2-24
2 Robot arm
2.5.8 Air supply circuit example for the hand
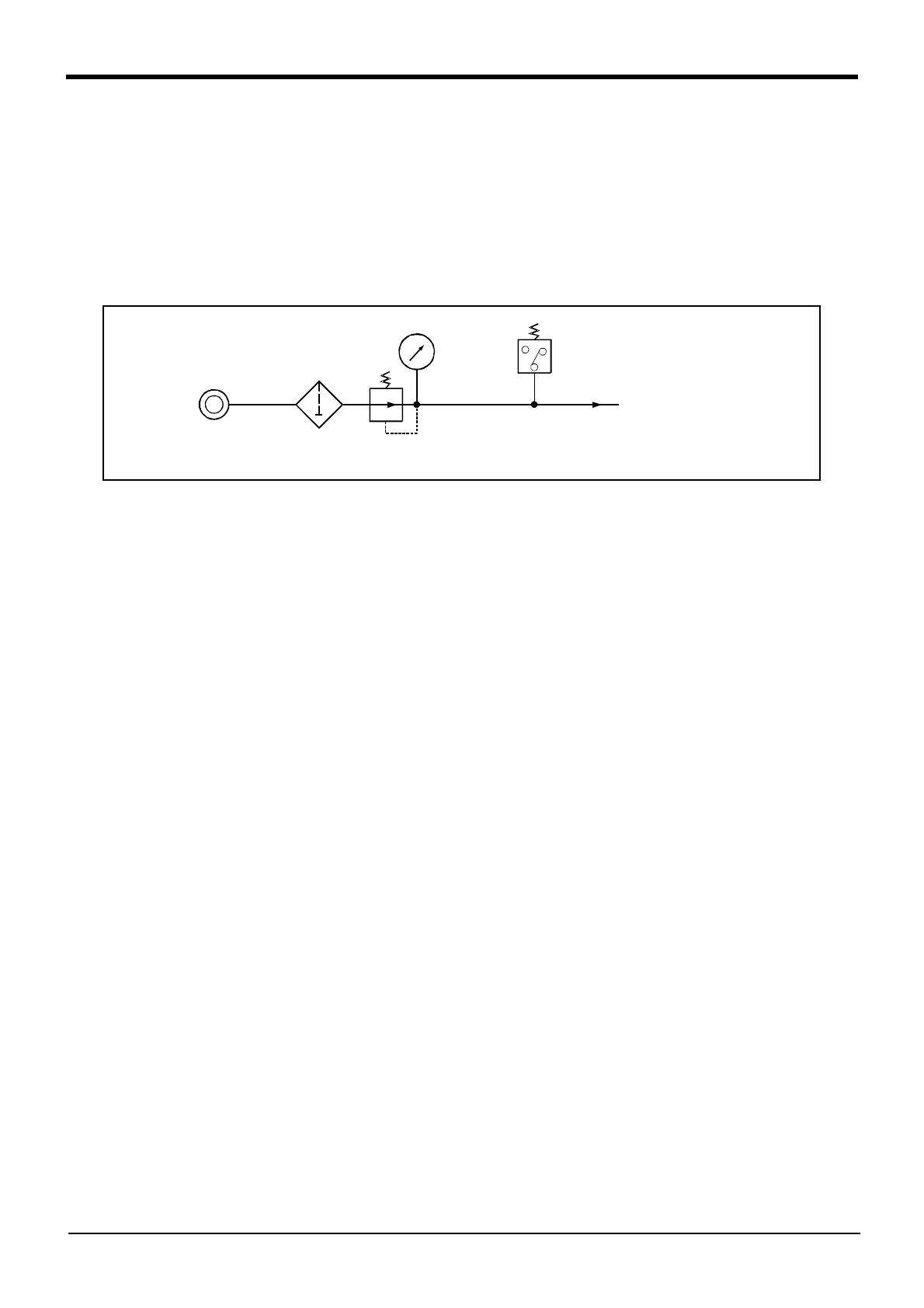
Fig. 2-12 shows an example of pneumatic supply circuitry for the hand.
(1) Place diodes parallel to the solenoid coil.
(2) When the factory pneumatic pressure drops, as a result of the hand clamp strength weakening, there can be
damage to the work. To prevent it, install a pressure switch to the source of the air as shown in
Fig. 2-12 and
use the circuit described so that the robot stops when pressure drops. Use a hand with a spring-pressure
clamp, or a mechanical lock-type hand, that can be used in cases where the pressure switch becomes dam
-
aged.
(3) The optional hand and solenoid valve are of an oilless type. If they are used, don't use any lubricator.
Fig.2-12 : Air supply circuit example for the hand
Pressure switch
To the robot's air intake
(0.5MPa ±10%)
Pneumatic source
0.7MPa less
Filter
Regurater

 Loading...
Loading...



