4. HOW TO USE THE POINT TABLE
4 - 51
4.4.3 Count type home position return
For the count type home position return, after the front end of a proximity dog is detected, the position is
shifted by the distance set in [Pr. PT09 Travel distance after proximity dog]. Then, the position specified by
the first Z-phase signal is used as the home position. Therefore, when the on-time of DOG (Proximity dog) is
10 ms or more, the length of the proximity dog has no restrictions. When the required proximity dog length
for using the dog type home position return cannot be reserved, or when DOG (Proximity dog) is entered
electrically from the controller or the like, use the count type home position return.
(1) Device/parameter
Set input devices and parameters as follows.
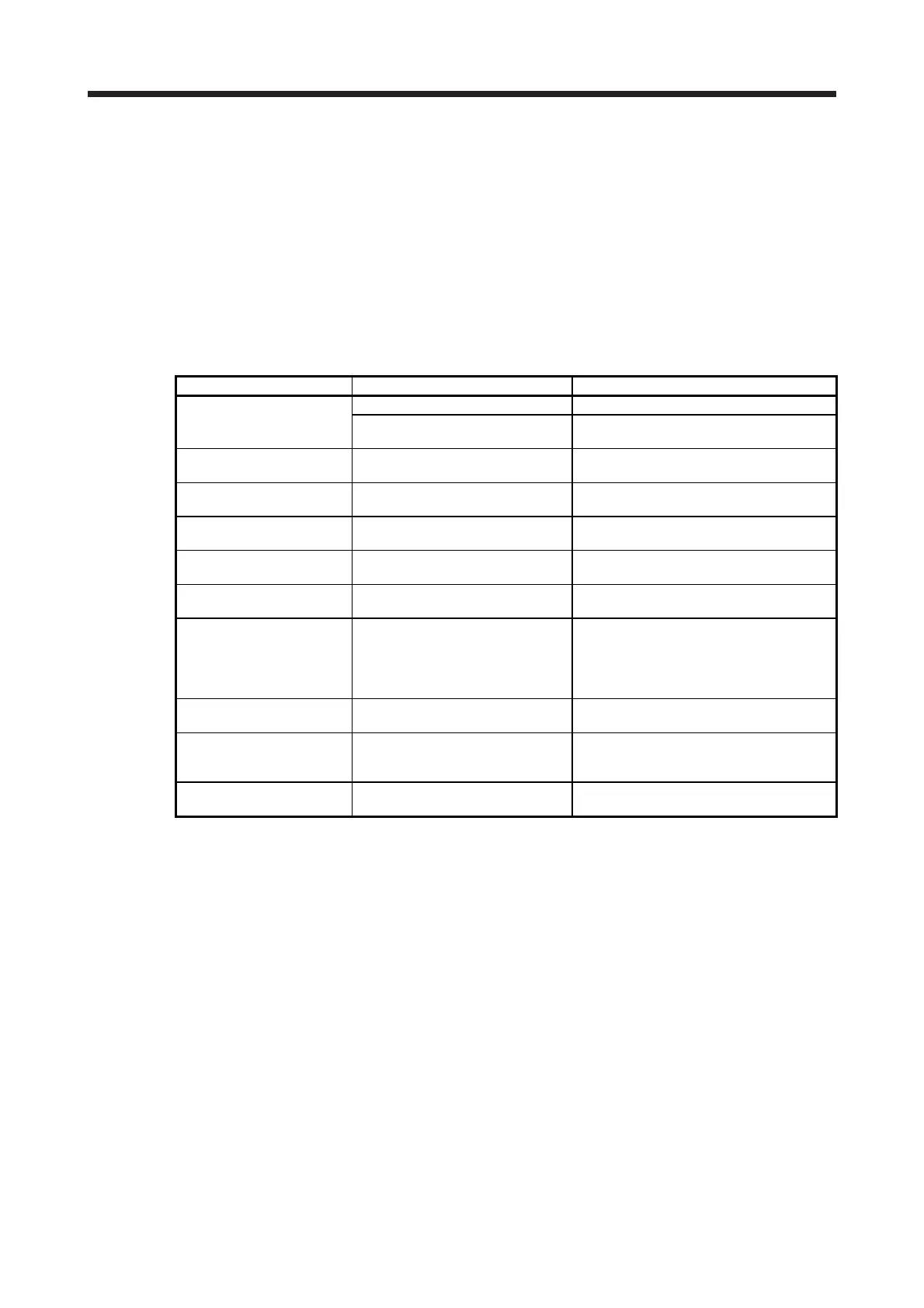
Item Device/parameter to be used Setting
Home position return mode
selection
MD0 (Operation mode selection 1) Switch on MD0.
DI0 (Point table No. selection 1) to
DI4 (Point table No. selection 5)
Switch off DI0 to DI4.
Count type home position
return
[Pr. PT04] _ _ _ 0: Select the count type.
Home position return
direction
[Pr. PT04]
Refer to section 4.4.1 (2) to select the home
position return direction.
Dog input polarity [Pr. PT29]
Refer to section 4.4.1 (2) to select the dog
input polarity.
Home position return speed [Pr. PT05]
Set the rotation speed specified until a dog is
detected.
Creep speed [Pr. PT06]
Set the rotation speed specified after a dog is
detected.
Home position shift distance [Pr. PT07]
After the front end of a proximity dog is
passed, the position is shifted by the travel
distance and then is specified by the first Z-
phase signal. Set this item to shift the position
of the first Z-phase signal.
Travel distance after proximity
dog
[Pr. PT09]
Set the travel distance specified after the front
end of the proximity dog is passed.
Acceleration time
constant/Deceleration time
constant
Point table No. 1
The acceleration/deceleration time constant
of point table No. 1 is used.
Home position return position
data
[Pr. PT08]
Set the current position at the home position
return completion.
 Loading...
Loading...

