6. APPLICATION OF FUNCTIONS
6 - 58
6.2.2 Interrupt positioning function
The interrupt positioning function executes an operation by changing the remaining distance to the travel
distance that is set with [Pr. PT31] (Mark sensor stop travel distance) when MSD (Mark detection) is turned
on. The interrupt positioning function is enabled by setting [Pr. PT26] to "1 _ _ _".
POINT
The interrupt positioning function can be used with the point table method and
the program method. However, the interrupt positioning function is disabled in
the following condition.
During home position return
During manual operation
During stop
During deceleration or stop with TSTP (Temporary stop/restart)
An error may occur depending on the droop pulses at the time of MSD (Mark
detection) is turned on and a minimum stopping distance required for
deceleration.
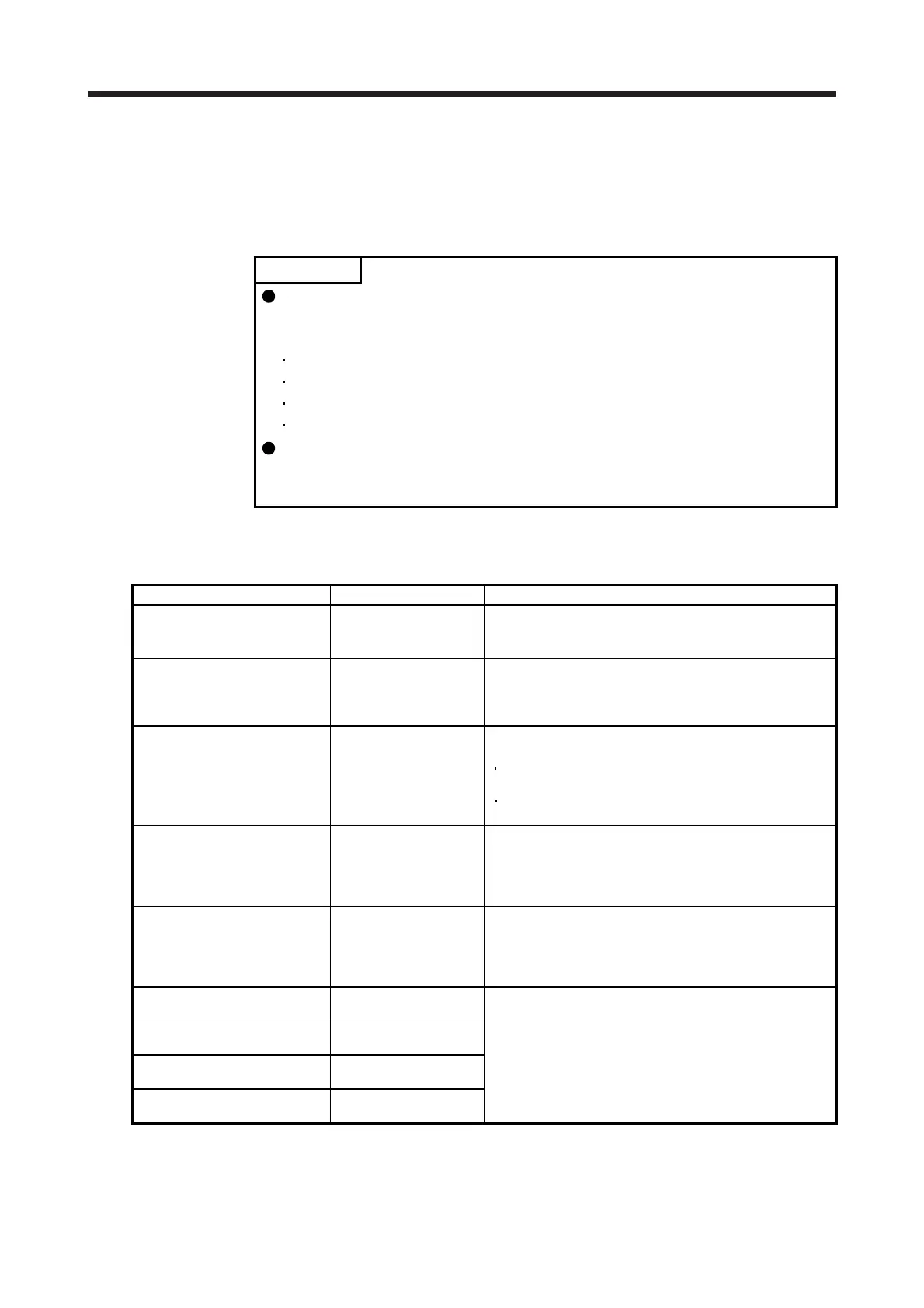
(1) Parameters
Set the parameters as follows:
Item Parameter to be used Setting
Control mode selection [Pr. PA01]
Select a control mode.
_ _ _ 6 (Positioning mode (point table method))
_ _ _ 7 (Positioning mode (program method))
Mark detection function selection [Pr. PT26]
Set the mark detection function selection as follows:
1 _ _ _: Interrupt positioning function
Starts the interrupt positioning function at rising of MSD (Mark
detection).
MSD (Mark detection) Polarity
selection
[Pr. PT29]
The polarity of MSD (Mark detection) can be changed with
[Pr. PT29].
Starts the interrupt positioning function at rising of MSD
(Mark detection) if "_ _ _ x" bit 3 of [Pr. PT29] is off.
Starts the interrupt positioning function at falling of MSD
(Mark detection) if "_ _ _ x" bit 3 of [Pr. PT29] is on.
Mark sensor stop travel distance
(lower three digits)
[Pr. PT30]
Set the lower three digits of the travel distance after the mark
detection.
The travel distance starts from the current position regardless
of the setting of absolute value command method or
incremental value command method.
Mark sensor stop travel distance
(upper three digits)
[Pr. PT31]
Set the upper three digits of the travel distance after the mark
detection.
The travel distance starts from the current position regardless
of the setting of absolute value command method or
incremental value command method.
Mark detection range + (lower
three digits)
[Pr. PC66]
Set the upper and lower limits of the interrupt positioning
function. If a sign for the upper and lower differ, [AL. 37]
occurs. When the roll feed display is enabled, set a valid
range with the travel distance from the starting position.
Mark detection range + (upper
three digits)
[Pr. PC67]
Mark detection range - (lower
three digits)
[Pr. PC68]
Mark detection range - (upper
three digits)
[Pr. PC69]
 Loading...
Loading...

