FPΣ
6.4 Pulse Output Function
6-49
R903A
R30
R32
DF
X8 R30
R903A
R32
T0 R32
DF/
R30
DF
R30 R31
R31
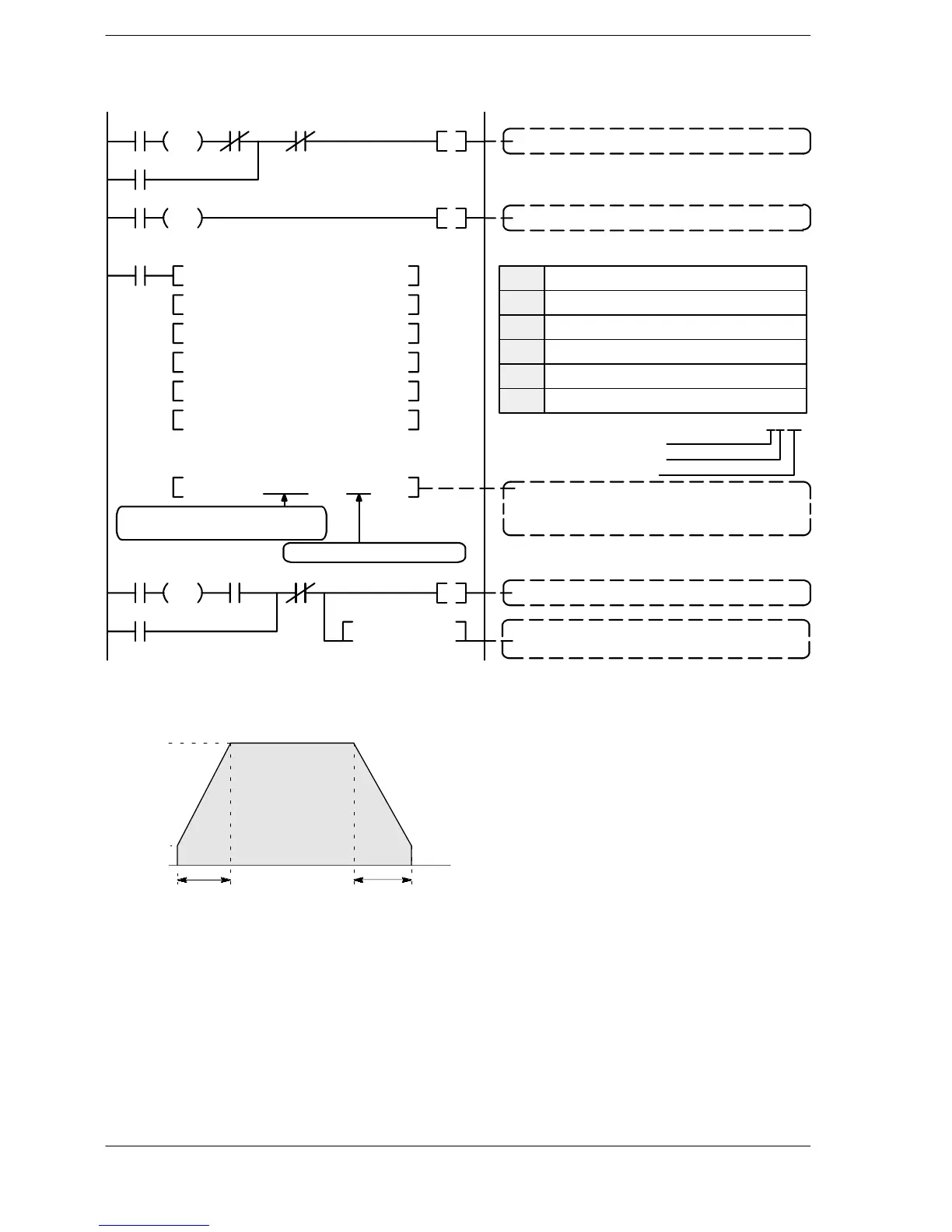
Positioning operation running
Positioning operation start
F1 DMV H 1110 ,DT 100
F171 SPDH DT 100 ,K 0
F1 DMV K 200 ,DT 102
F1 DMV K 4000 ,DT 104
F1 DMV K 250 ,DT 106
F1 DMV K 22000 ,DT 108
F1 DMV K 0 ,DT 110
TMX 0, K 10
Program
Positioning data table
Pulse output instruction (table-shaped control)
The data table headed by DT100 is used and
pulses are output from CH0.
The data table headed by DT100
is used.
Pulses are output from CH0.
Positioning done pulse (1 second)
0.1 s type timer
Setting K10 and using it as a 1-second timer
H11
Duty 1/4 (25%)
48 Hz to 100 kHz
Absolute CW and CCW
* Control code
DT100
DT101
DT102
DT103
DT104
DT105
DT106
DT107
DT108
DT109
DT110
DT111
Control code *: H 1110
Initial speed: 200 Hz
Maximum speed: 4,000 Hz
Acceleration time: 250 msec
Target value (Movement amount) :22,000 pulses
Pulse stop
10
Figure 113: FPΣ Sample program - absolute value positioning operation (program)
Pulse output diagram
250 ms 250 ms
4,000Hz
200 Hz
0Hz
Figure 114: FPΣ Sample program - pulse output diagram

 Loading...
Loading...

