Page 31/55 68_Afficheur_Multidisplay_um_UK_11
2.10.2 Calibrations order
Check and calibrate the primary sensors before filling the true wind correction tables:
• Compass
• Speed sensor
• Heel angle sensor
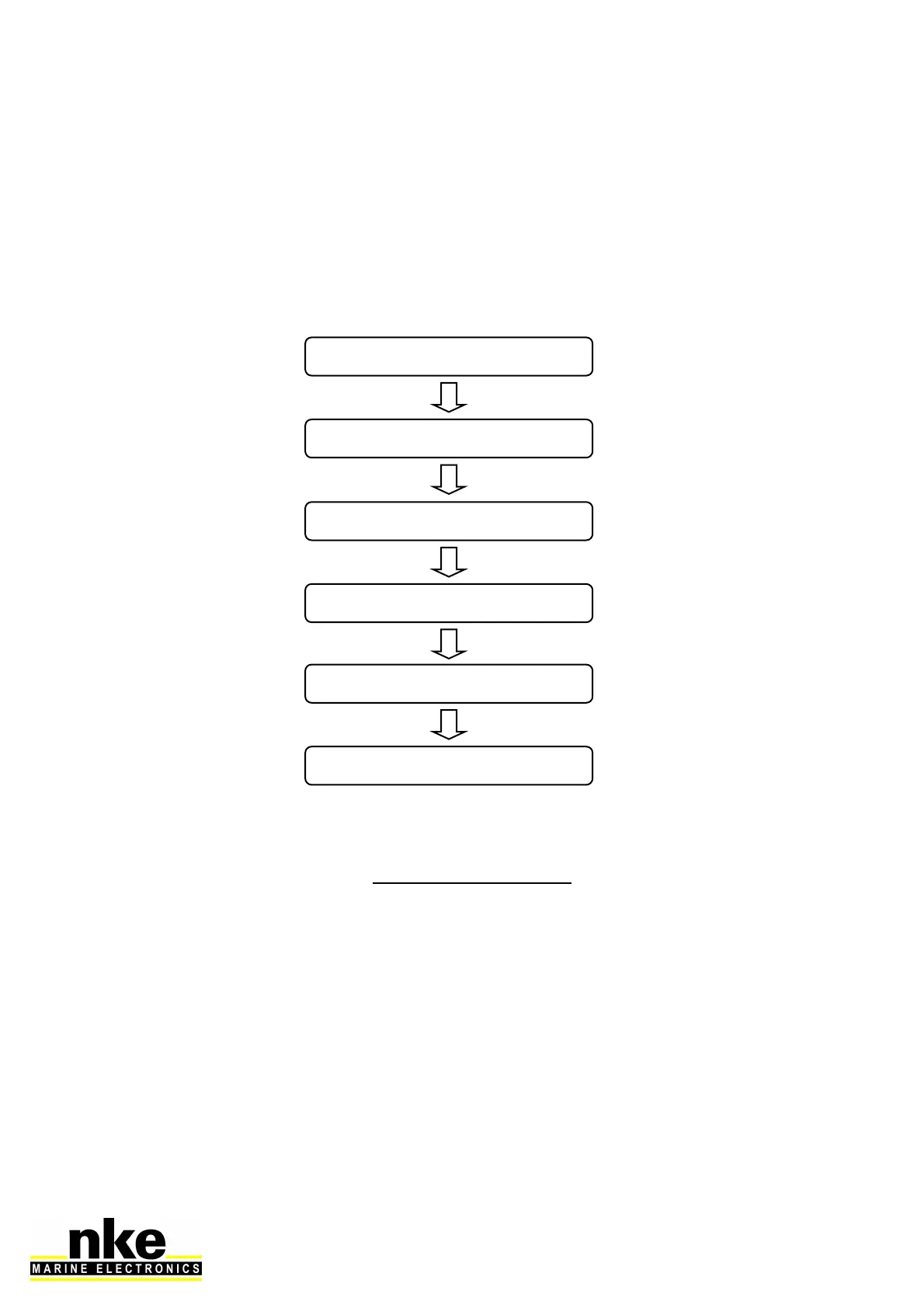
Here is the order in which the primary sensors need calibration:
For sensor calibration, see the “Sensors setting” section.
2.11 MULTIDISPLAY OPERATION WITH THE GYROPILOT 2
PROCESSOR
Gyropilot is an automatic pilot designed to steer the boat. It is intended to assist the
helmsman and should never be used without state of the art navigation equipment
handled by a qualified navigator.
Once the pilot has been engaged by the helmsman the Gyropilot 2 processor will
save the current value of the relevant channel: ie. magnetic heading, wind angle or
GPS course. This value becomes the reference for course to steer.
Compass calibration
Heel sensor calibration
Speed sensor calibration
Apparent wind calibration
True wind correction tables
Drift angle calibration