Page 38/55 68_Afficheur_Multidisplay_um_UK_11
feature will depend on the type of boat and sea conditions. The boat rotation speed
measured by the gyrometer embedded in the Gyropilot processor is used to
provide this feature.
The factory default setting is AUTO. This adjusts automatically with the gain. The
setting value ranges from 1 to 9. The counter rudder angle is the lowest at 1.
Note that when the counter rudder setting is on AUTO, the counter rudder action is
dependent on the gain setting. For a rudder gain between 1 and 3, the gyrometer is
not active and there is no counter rudder. For a gain value between 4 and 9, the
gyrometer is active and the counter rudder value is automatically adjusted.
Wind damping
The wind damping value adjusts the treatment of the raw data coming from the
sensor and how it is used by the pilot while steering in wind mode. For example, in
rough seas it is useful to increase the damping value because the mast head unit is
subjected to a lot of extreme movements and the wind measurements resulting from
this need to be treated differently to maintain appropriate pilot performance and sea
keeping. In light wind and quiet sea conditions a low damping value will allow a finer
response to changes measured optimising the performance of the pilot for the
conditions. The damping value ranges from 1 to 9. The default setting is 1.
The value set to 0 means automatic wind damping. In that case the damping is linked
to the wind vane oscillations with 0.5 seconds for each degree of oscillation.
Example: if the wind vane oscillation is +/-10°, the damping is 10 seconds.
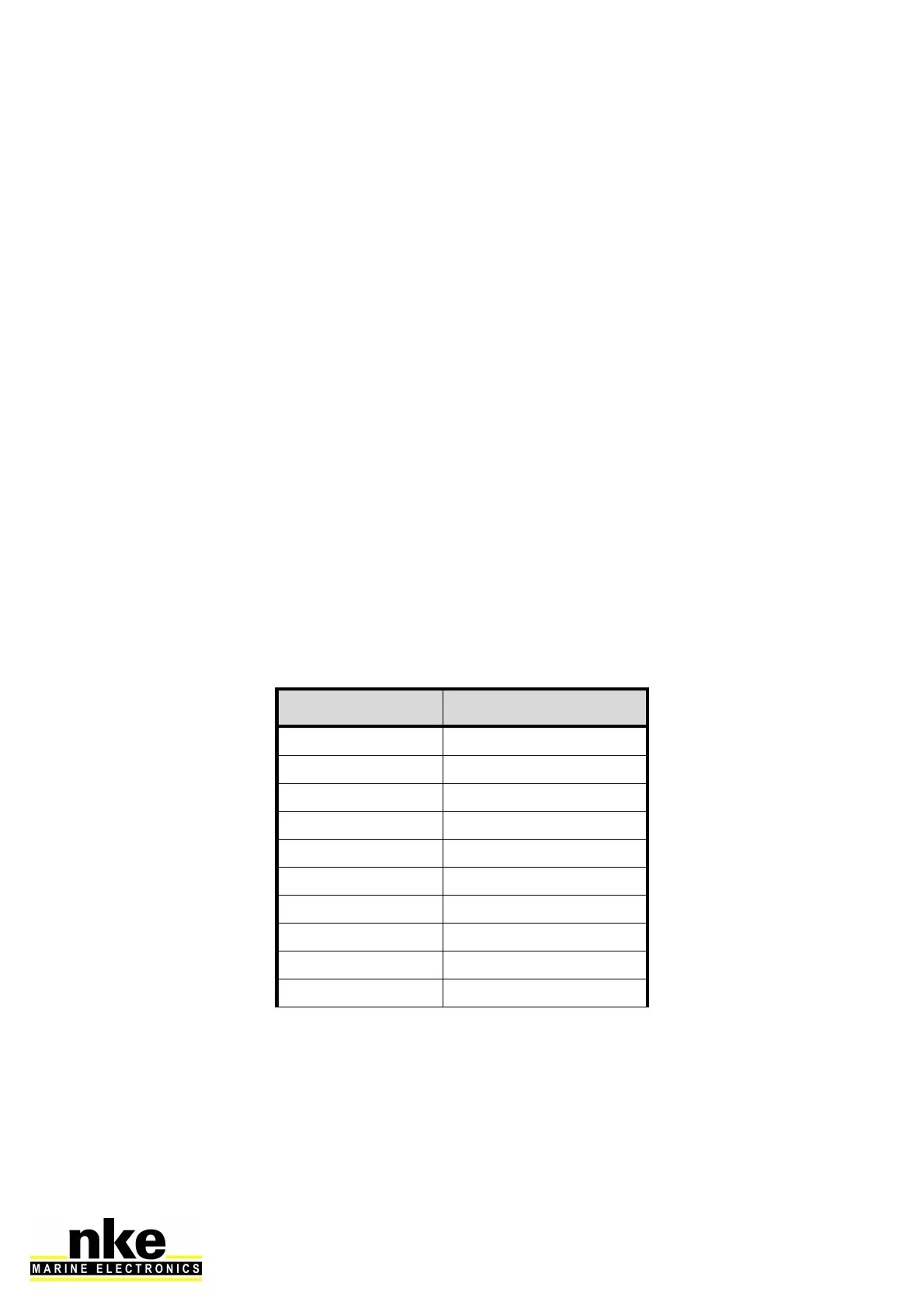
Damping value
effect
L = 0 automatic
L = 1 1s
L = 2 2 s
L = 3 4s
L = 4 8 s
L = 5 16 s
L = 6 32 s
L = 7 64 s
L = 8 128 s
L = 9 256 s
Tacking angle
Set the tacking angle value for automatic tack performed by the Gyropilot.
For the compass mode the tacking angle can be set between 70° and 115° (by 5°
steps). The default setting is 100°.