64
Safety Device Function Blocks Section 3-5
4. When the operator completes his task and the Safety Light Current is un-
obstructed as the robotic arm rotates, Muting Signal 11 goes OFF, the mut-
ing status is cleared, and the Muting Status goes OFF.
■ Timing Chart
Conditions Required for Muting to Start
1) Sequence Check
• MS 11 turning ON is detected. S1 must be ON and S2 must be OFF.
Note Muting is not started at the start of operation (i.e., when changing from IDLE
to RUN mode). MS11 must change from OFF to ON.
Conditions Required for Muting to End
1) Sequence Check
• MS11 turning OFF is detected. S1 must be OFF and S2 must be ON.
2) Maximum Time Check
• The maximum muting time has been exceeded.
Note The time for Safety Light Current muting to turn OFF is not monitored.
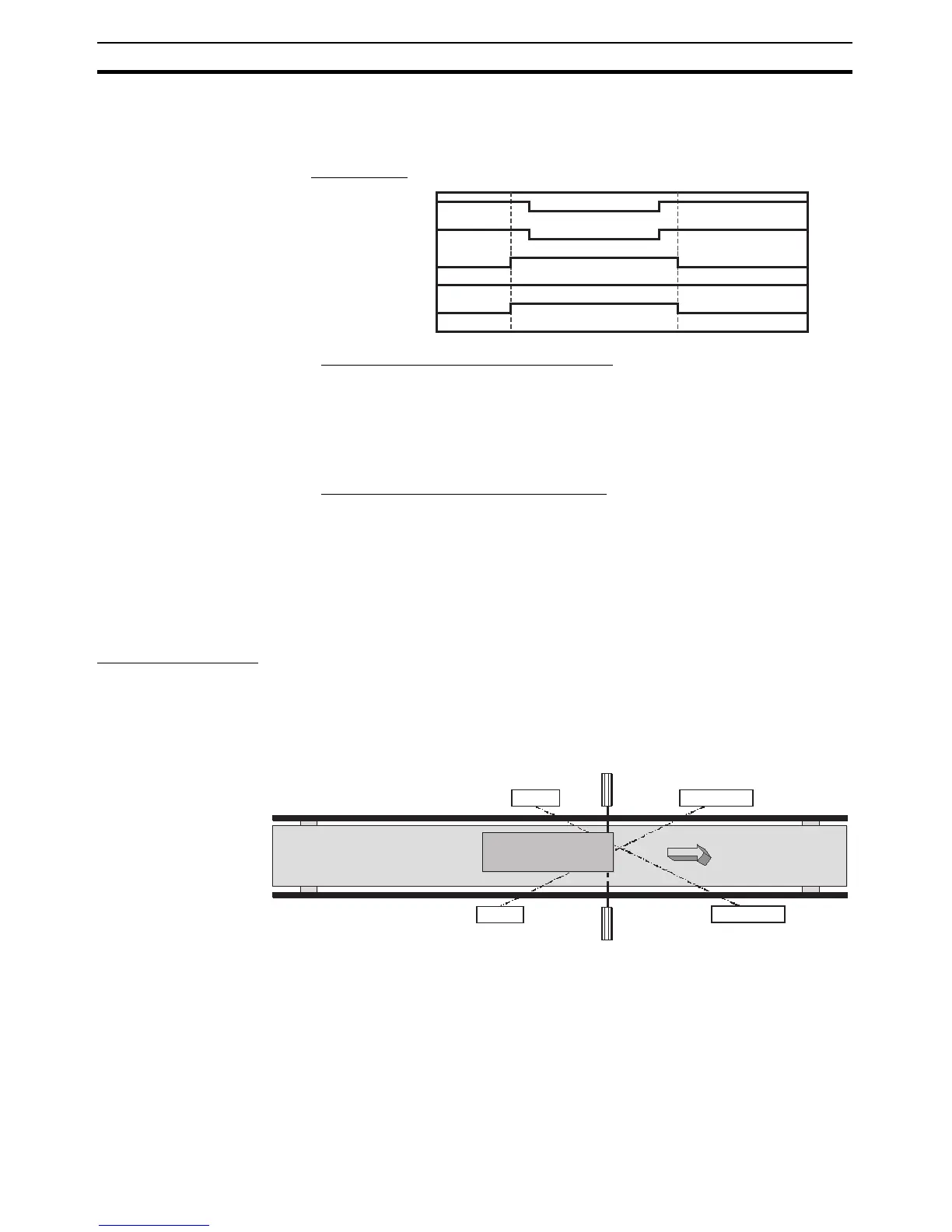
Override Function The Override function can turn ON the safety output ON even though the light
interruption signal of the Safety Light Current is inactive. If a workpiece gets
jammed during transit as shown in the following diagram, the system cannot
be returned to normal operation without forcibly removing the workpiece. In a
situation like this, the Override function can be used to move the workpiece
out of the light curtain detection zone.
MS11: Muting sensor connected to Muting Signal 11
MS12: Muting sensor connected to Muting Signal 12
Override Sequence
1. In the block diagram above, the Output Enable signal is OFF.
2. When the Override Input goes ON, the Override starts and the Override
Status goes ON. As long as the Override Input is ON, the muting status is
continued, and the Output Enable signal is ON.
Muting Signal 11
Output Enable
AOPD Input 2 (NC)
Muting Status
AOPD Input 1 (NC)
MS11
MS12
Light curtain
MS11
MS12
WORK
Reflected Board
Reflected Board
 Loading...
Loading...










