Enable error reset command
Disable error reset command
2. Safety Key
Selector Switch
Run Servomotor at normal velocity and deactivate SOS
function.
Make Servomotor decelerate to a stop and activate SOS
function using SS2 function. When position or velocity exceeds
SOS position or velocity zero window, Servo Drive goes into
STO state and Excessive Limit Value Error occurs.
SLS function deactivated: Enable STO command
SLS function activated: Disable STO command
4. Emergency Stop
Pushbutton Switch
Enable error reset commands for Safety-door Switch and
Emergency Stop Pushbutton Switch
Disable error reset commands for safety-door switch and
Emergency Stop Pushbutton Switch
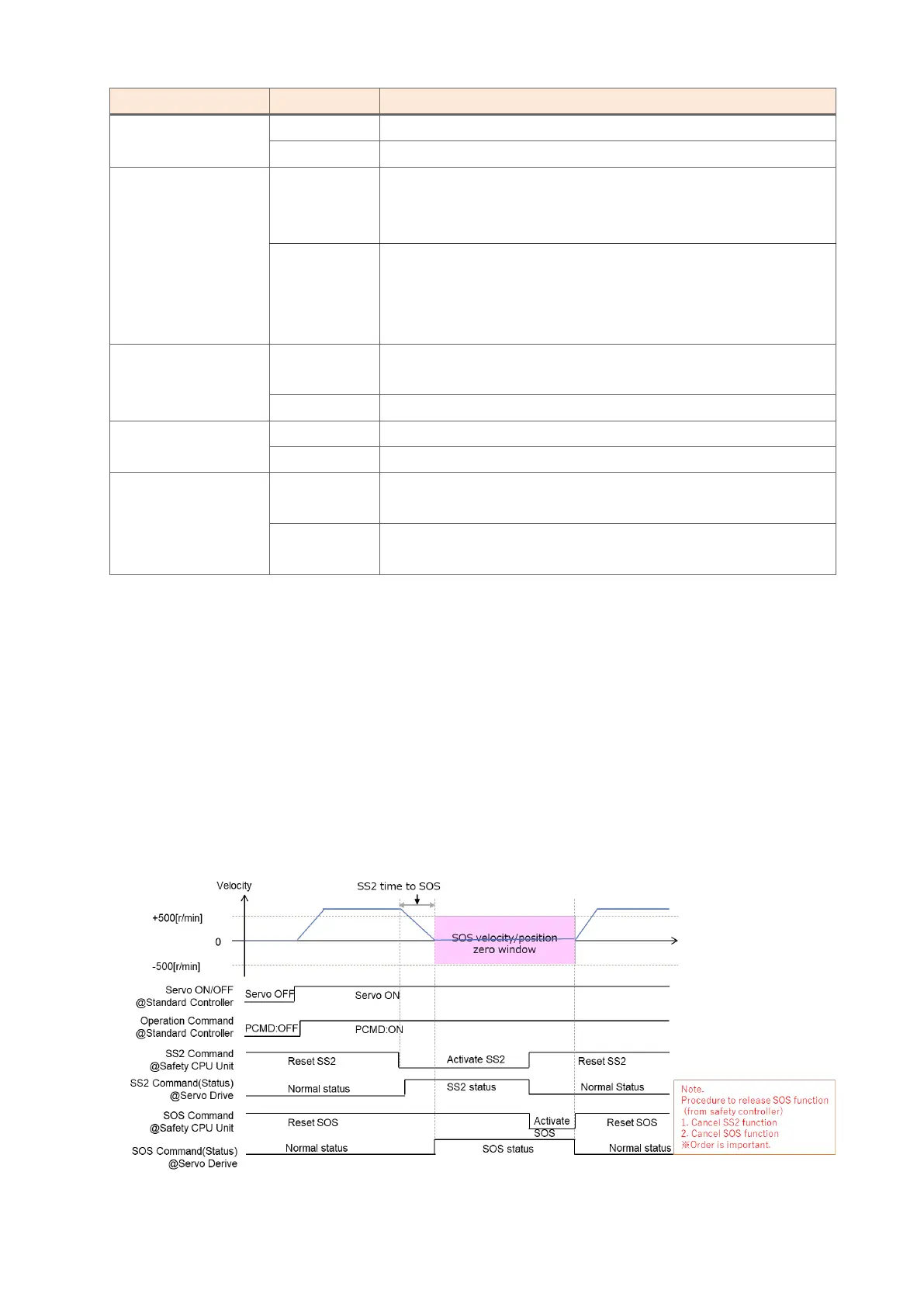
□ Operation of motion control and SS2 function
1. When the Servo ON command is enabled, the Servo Drive turns ON the Servo.
2. When an operation command is enabled, the command velocity to the Servomotor is set to 600
r/min.
3. When the SS2 function is executed, the Servo Drive shifts to the SOS state after the delay time
(SS2 time to SOS) and monitors the present position and velocity.
The standard controller lets the Servomotor decelerate to a stop.
4. When the SS2 and SOS functions are released, the Servo Drive goes into the normal state and
stops monitoring the present position and velocity.
The standard controller sets the command velocity to the Servomotor to 600 r/min.
 Loading...
Loading...

