11-3
11 Adjustment Functions
G5-series AC Servomotors and Servo Drives User’s Manual (with Built-in EtherCAT Communications)
11-1 Analog Monitor
11
11-1-1 Objects Requiring Settings
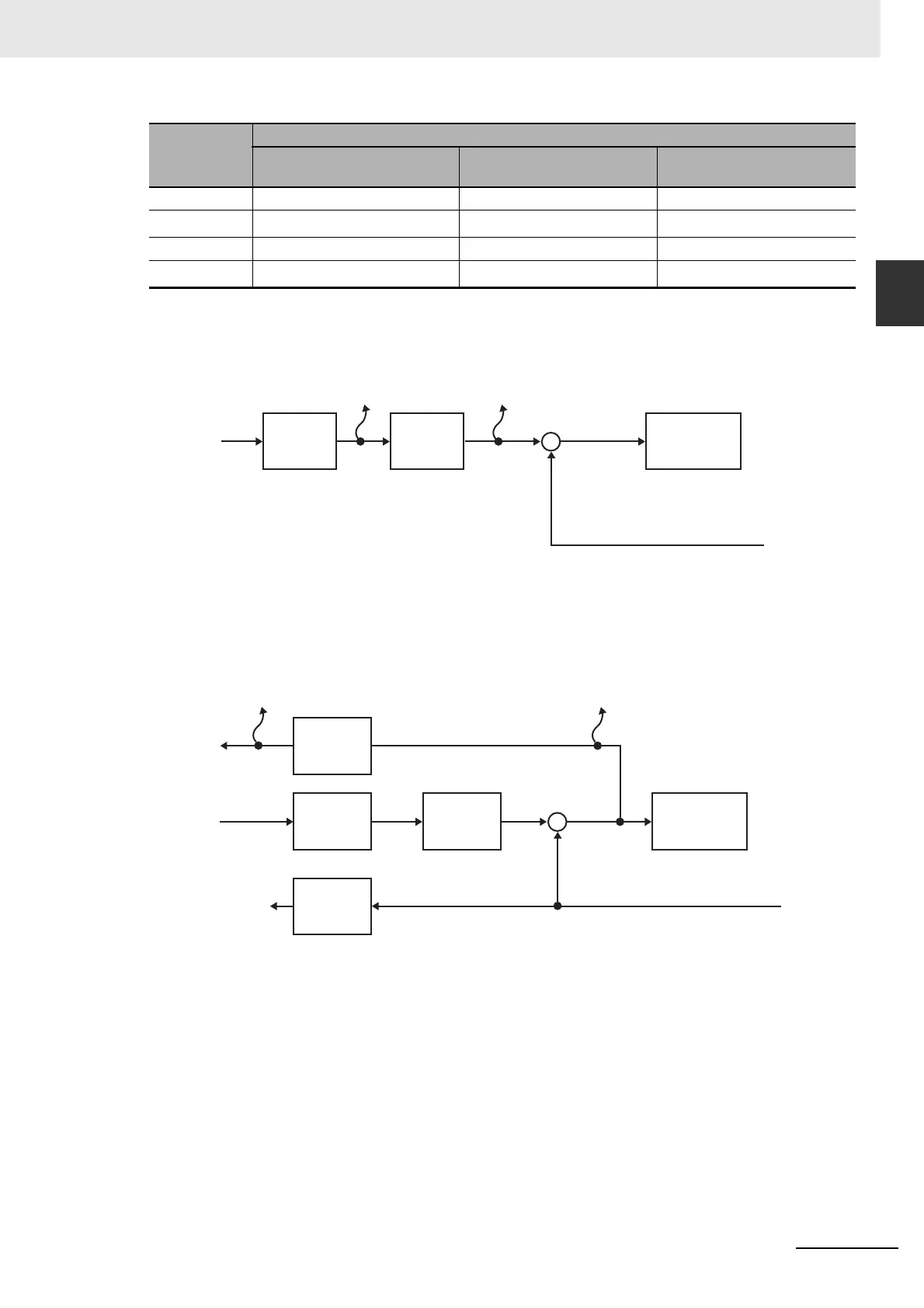
*1 The Internal Command Motor Speed is the speed before the command input passes through the command
filter (the position command filter time constant and the smoothing filter time constant). The Filtered Internal
Command Motor Speed is the speed after the command input passes through the command filter.
*2 The position error is calculated for the command input after processing for the position command filter. The
pulse position error or fully-closed position error is reversely converted to command units for application.
The pulse position error or fully-closed error is the error for the position control input.
*3 The encoder temperature is indicated only for a 20-bit incremental encoder. The value is not stable for other
types of encoders.
*4 The direction of monitor data, either forward or reverse, is the direction set in the Rotation Direction Switching
(3000 hex). However, CCW is the forward direction for the absolute encoder 1-rotation data.
A normal value is output from the incremental encoder after the first phase Z.
16 to 18 Reserved −−
19
Encoder Temperature
*3
°C10
20 Servo Drive Temperature °C10
21
Encoder 1-rotation Data
*4
pulses (encoder units) 110,000
3416 hex and
3418 hex set
value
Description
Monitoring item Unit
Output gain when 3417 hex
and 3419 hex are set to 0
Command
input
Electronic
gear
Internal Command
Motor Speed [r/min]
Filtered Internal
ommand
Motor Speed [r/min]
+
−
Position
command
filter
Position
Control
(Encoder feedback/external
encoder feedback)
Position actual internal
value [encoder
units/external encoder units]
Command
input
Electronic
gear
Pulse Position Error [encoder units]
/Fully-closed Error [external encoder units]
Position
command
filter
Position
control
(Encoder feedback/external
encoder feedback)
Position Error [command units]
Electronic gear
reverse
conversion
Position actual internal value
[encoder units/external encoder units]
Position actual value
[command units]
Electronic gear
reverse
conversion
+
−

 Loading...
Loading...




