Operation
−109−
5 Operation in speed control mode
3 Operation
The motor operation can be started or stopped by inputting signals to control operation.
3.1 Start operation and stop operation
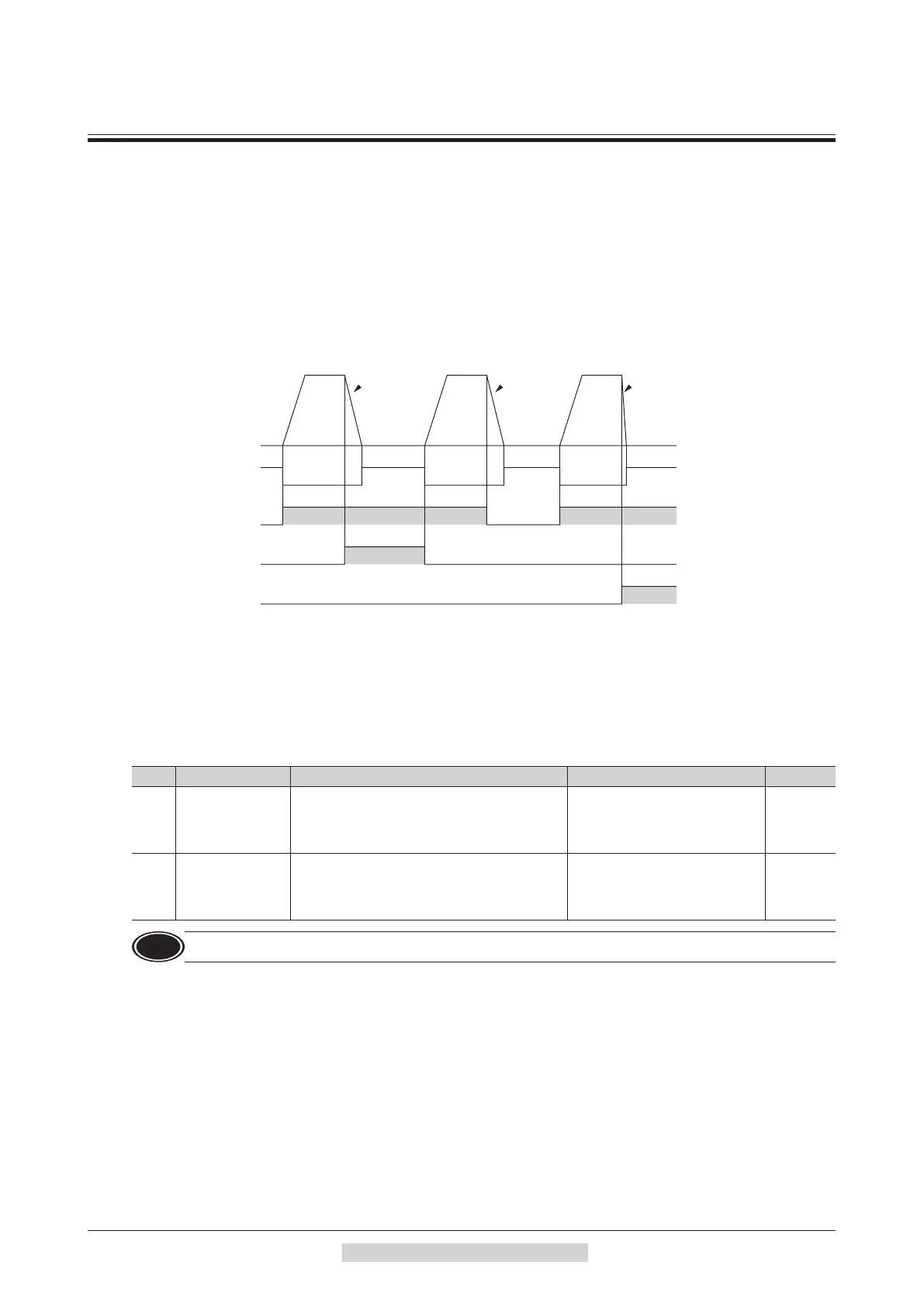
Start operation
When the FWD input is turned ON, the motor rotates in the forward direction. When it is turned OFF, the motor stops.
When the RVS input is turned ON, the motor rotates in the reverse direction. When it is turned OFF, the motor stops.
If both the FWD and RVS inputs are turned ON, the motor decelerates to a stop.
If the STOP input is turned ON while operating the motor, the motor will stop instantaneously. The stopping method
can be changed by the "STOP input action" parameter (ID: 256).
Release
Hold
ON
OFF
ON
OFF
ON
STOP input
RVS input
FWD input
Motor operation
stop
stop
stop
tromagnetic
brake∗
*
When the electromagnetic brake motor is used
Stop operation
When the STOP input is turned ON, the motor stops according to the setting of the "STOP input action" parameter.
If the "Operation selection after stopping" parameter (ID: 2069) is set to 0, either of "immediate stop" or "deceleration
stop" can be selected. And if it is set to 1, the holding force is generated when the motor stops (excitation ON).
Related parameters
ID Parameter name Description Setting range Initial value
256 STOP input action
Sets how to stop the motor when the STOP input
is turned ON.
0: Immediate stop
1: Deceleration stop
2: Immediate stop + current OFF
3: Deceleration stop + current OFF
0
2069
Operation selection
after stopping
Uses in the speed control mode.
If the holding force is required to generate while
the motor stops, set this parameter to "1" to
enable the servo lock.
0: Free (disable servo lock)
1: Servo lock
0
Note
The "Operation selection after stopping" parameter will be enabled after the power is turned on again.
 Loading...
Loading...
