Parameter
−93−
4 Parameter list
2.3 Operation parameters
All parameters can be set in both the speed control mode and position control mode.
Parameters that can be used vary depending on the control mode.
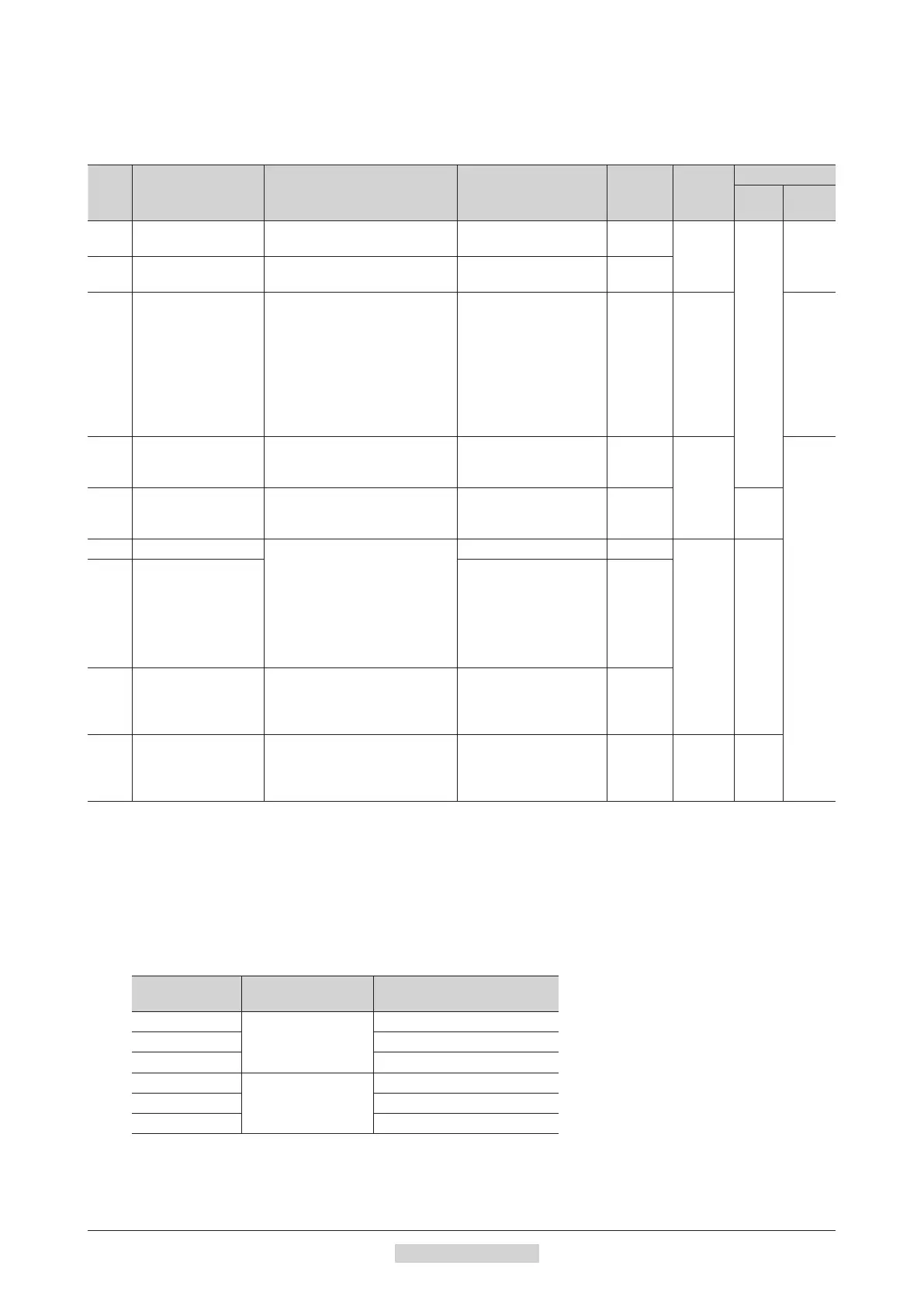
ID Parameter name Description Setting range
Initial
value
Update
*
1
Control mode
*2
Speed
control
Position
control
323 JOG operating speed
Sets the operating speed for JOG
operation.
0 to 4000 r/min 300
B
324 JOG acceleration
Sets the acceleration/deceleration
time for JOG operation.
0.000 to 30.000 s 0.100
2069
Operation selection
after stopping
Uses in the speed control mode.
If the holding force is required to
generate while the motor stops,
set this parameter to "1" to enable
the servo lock. However, when
the “STOP input action” parameter
(ID: 256) is set to 2 or 3, the
holding force will not generate
even if “1: Servo lock” is set.
0: Free (disable servo lock)
1: Servo lock
0 C ×
2081
Operating torque of
JOG operation
Sets the maximum torque based
on the rated torque being 100%
during JOG operation.
0 to 250% 100
B
2084 JOG travel amount
Sets the travel amount for JOG
operation. The motor shaft rotates
by 0.72° per one step.
1 to 8,388,607 steps 1 ×
2085 Gear Ratio If the gear ratio is set, the rotation
speed that is calculated based on
the actual speed of the motor will
be displayed. The gear ratio can
be set by multiplying the value
in “Gear ratio" parameter by the
value in "Decimal place for gear
ratio" parameter.
100 to 9999 100
A
2086
Decimal place for gear
ratio
0: ×1
1: ×0.1
2: ×0.01
2
2087 Multiplying gear
If the multiplying gear is set, the
rotation speed that is calculated
based on the actual speed of the
motor will be displayed.
1 to 5 1
2289
Compatible command
- continuous operation
Uses in the
BX
-compatible mode
(position control). Sets whether
to enable or disable continuous
operation.
0: Disable
1: Enable
0 C ×
*1
It indicates the timing for the data to update. (A: Update immediately, B: Update after operation stop, C: Update after turning on the
power again)
*2
: Possible to use.
×: Not possible to use.
How to set the gear ratio
Set the gear ratio as a combination of the "Gear ratio" parameter (ID: 2085) and "Decimal place for gear ratio" parameter
(ID: 2086).
The relationships between the gear ratio and the decimal position are explained shown in the table below.
Actual gear ratio "Gear ratio" parameter
"Decimal place for gear ratio"
parameter
1.00 to 9.99
100 to 999
2
10.0 to 99.9 1
100 to 999 0
10.00 to 99.99
1000 to 9999
2
100.0 to 999.9 1
1000 to 9999 0
 Loading...
Loading...
