Positioning operation
−122−
6 Operation in position control mode
•
Notes about sequential positioning operation
If the following operations are performed while sequential positioning operation is executed, the starting point of the
sequential positioning operation will be changed to the operation No.0.
And the present operation data number will be set to "
–
1."
•
When the power supply was turned on
•
When any of operations other than positioning operation was executed
•
When an alarm was generated and reset
•
When the BRAKE (STOP) input was turned ON
•
When a command to turn o the motor excitation, such as the FREE input or S-ON input, was input
•
When the position preset was executed
Note
When sequential positioning operation of the operation data which "Operation function" is set to "Linked-
motion" or "Linked-motion 2” is performed, set the "Sequential positioning" to "Enable."
2.3 Operation function
Single-motion operation
Positioning operation is executed only once using a single operation data set.
•
Example of single-motion operation
Operation
data
Position
Operating
speed
Operation
mode
Operation
function
Acceleration
time
Deceleration
time
Torque limit
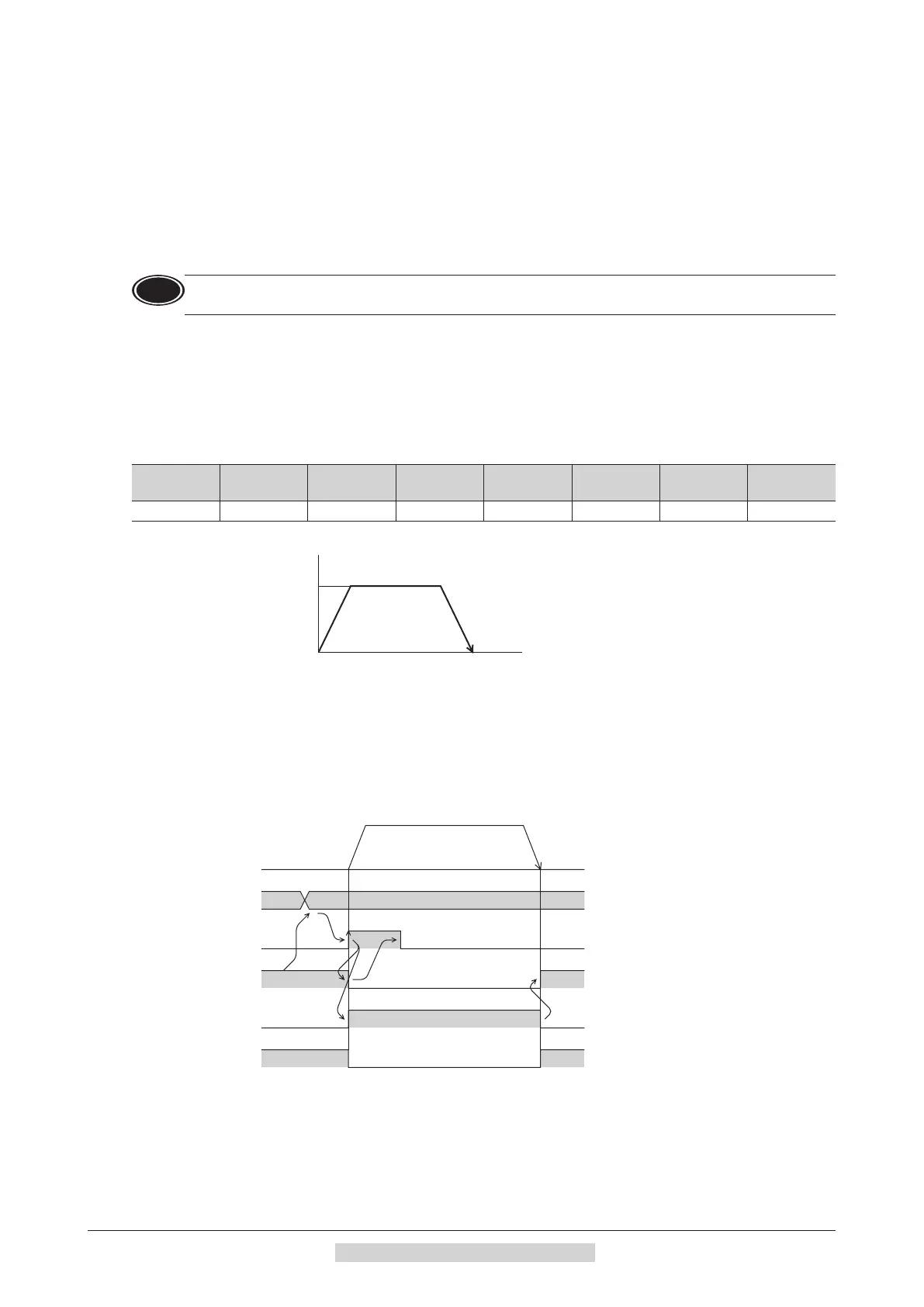
No.1 5000 1000 INC Single-motion 1.000 1.000 250
Operation image
Speed
Operating speed of data No
.1: 1000
Operation data
No.1
Operating method
1) Check the READY output is being ON.
2) Turn the M0 input ON to select the operation data No.1, and turn the START input ON.
3) The motor starts positioning operation of the operation data No.1.
4) Check the READY output has been turned OFF and turn the START input OFF.
5) When the positioning operation is completed, the READY output is turned ON.
①
②
⑤
④
START input∗
MOVE output
END output
READY output
Motor movement
∗ No.0 No.1
No.1
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
③
*
After setting the M0 to M3 inputs, wait at least 10 ms before turning the START input ON.
 Loading...
Loading...
