You can set up the pulse counts to be fed out from the pulse outputs (X5 OA+: Pin-
21, OA–: Pin-22, OB+: Pin-48, OB-: Pin-49).
• In case the external scale pulse is fed out
(When the control mode is full-closed control and Pr46 (Reversal of pulse output
logic) is 2 or 3.)
Pr45 = 0 : No division will be executed.
When Pr45 is other than 0, travel per one pulse will be divided with discrete ratio
according to the formula below.
<Cautions>
• Travel per one pulse of the external scale is 0.05 [É m] for AT500 series, and 0.5
[É m] for ST771 series.
• Setup of Pr44 > Pr45 becomes invalid. (In this case, no division will be executed)
•
Z-phase will be fed out synchronizing with A-phase when the work crosses the zero
absolute position at first time after the control power is turned on. After this, Z-phase
will be fed out at the intervals set with Pr47 (Z-phase setup of external scale).
• In case the encoder pulse is fed out
(When the control mode is position, velocity and torque control, and P446
(Reversal of pulse output logic) is 0 or 1.)
You can set up the pulse counts to be fed out from the pulse output (X5 0A+ : Pin-
21, 0A- : Pin-22, 0B+ : Pin-48, 0B- : Pin-49).
• Pr45=<0> (Default)
You can set up the output pulse counts per one motor revolution for each OA
and OB with the Pr44 setup. Therefore the pulse output resolution after
quadruple can be obtained from the formula below.
• Pr45≠0 :
The pulse output resolution per one revolution can be divided by any ration
according to the formula below.
<Cautions>
• The encoder resolution is 131072 [P/r] for the 17-bit absolute encoder, and
10000 [P/r] for the 5-wire 2500P/r incremental encoder.
• The pulse output resolution per one revolution cannot be greater than the
encoder resolution.
(In the above setup, the pulse output resolution equals to the encoder resolution.)
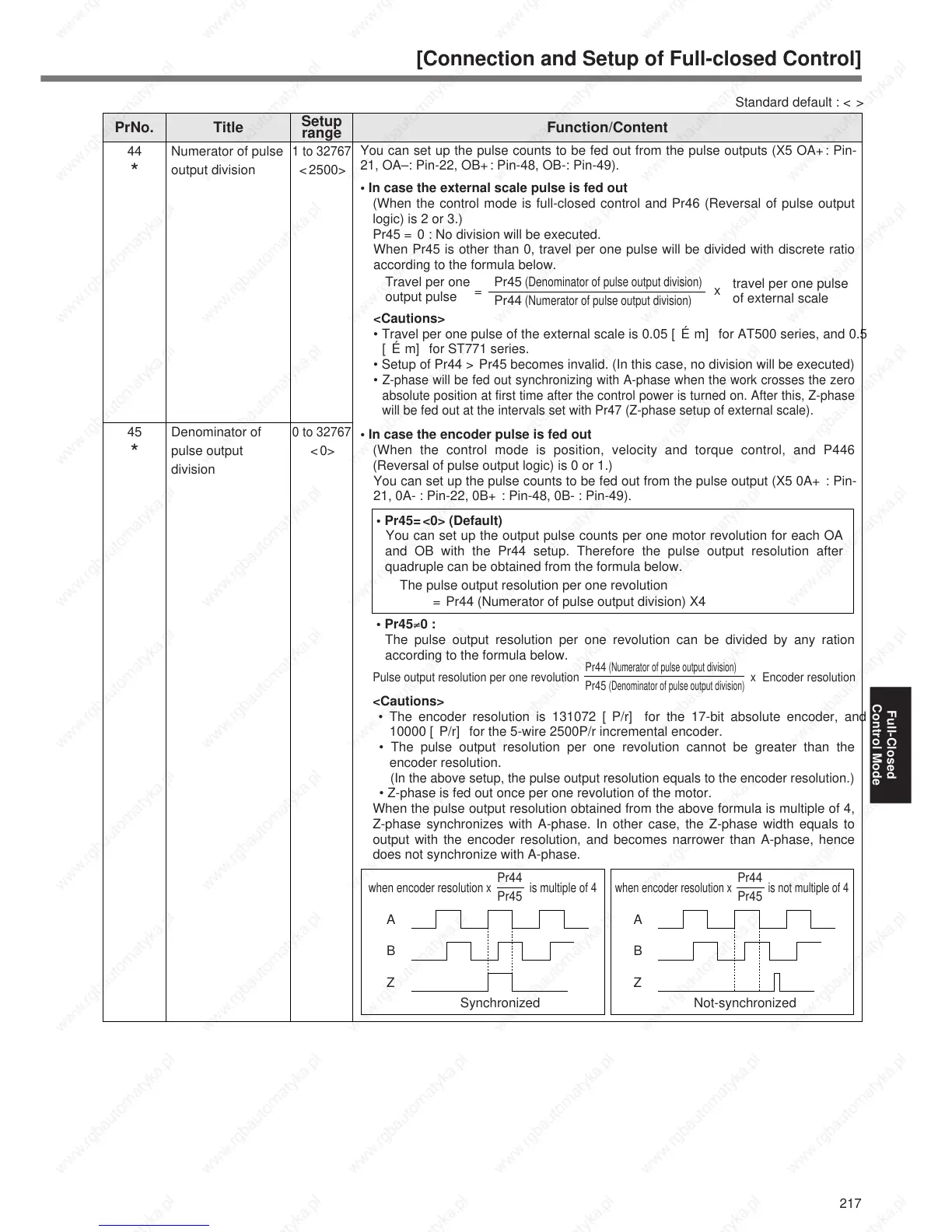
• Z-phase is fed out once per one revolution of the motor.
When the pulse output resolution obtained from the above formula is multiple of 4,
Z-phase synchronizes with A-phase. In other case, the Z-phase width equals to
output with the encoder resolution, and becomes narrower than A-phase, hence
does not synchronize with A-phase.
Pr45
(Denominator of pulse output division)
Pr44
(Numerator of pulse output division)
Travel per one
output pulse
travel per one pulse
of external scale
=
x
44
*
45
*
1 to 32767
<2500>
0 to 32767
<0>
Numerator of pulse
output division
Denominator of
pulse output
division
The pulse output resolution per one revolution
= Pr44 (Numerator of pulse output division) X4
Pr44
(Numerator of pulse output division)
Pr45
(Denominator of pulse output division)
Pulse output resolution per one revolution x Encoder resolution
A
B
Z
Synchronized
A
B
Z
Not-synchronized
Pr44
Pr45
when encoder resolution x is multiple of 4
Pr44
Pr45
when encoder resolution x is not multiple of 4
PrNo.
Setup
range
Title Function/Content
Standard default : < >

 Loading...
Loading...