Trial Run (JOG run) at Velocity Control Mode
Trial Run by Connecting the Connector, CN X5
1) Connect the CN X5.
2) Enter the power (DC12-24V) to control signal (COM+, COM–)
3) Enter the power to the driver.
4) Confirm the default values of parameters.
5) Set a lower value to Pr56 (4th speed of speed setup).
6) Energize the motor by connecting the Servo-ON input (SRV-ON, CN X5, Pin-29) and COM– (Pin-41 of
CN X5) to turn to Servo-ON status.
7) Confirm that the motor runs as per the setup of Pr56 by applying DC voltage (positive/negative) between
the torque command input (Pin-14 of CN X5) and GND (Pin-41 of CN X5).
8) If you want to change the torque magnitude, direction and velocity limit value against the command
voltage, set up the following parameters.
Pr56 : 4th speed of speed setup
Pr5C : Torque command input gain
Pr5D : Torque command input reversal
9) If the motor does not run correctly, refer to P.68, "Display of factor for No-motor running" of Preparation.
Refer to P.183, "Parameter Setup-Parameters
for Velocity and Torque Control".
COM+
SRV-ON
SPR/TRQR
GND
COM–
7
29
14
15
41
DC
12V – 24V
DC
10V
Title
Setup of control mode
Invalidation of over-travel inhibit input
Selection of ZEROSPD
4th speed of speed setup
Selection of torque command
Torque command input gain
Torque command input reversal
PrNo.
02
04
06
56
5B
5C
5D
Setup value
2
1
0
lower value
0
In case of one way running
For bi-directional running
(CW/CCW), provide a bipolar
power supply.
Title of signal
Servo-ON
Speed zero clamp
No.
0
5
Monitor display
+A
–
Parameter
Wiring Diagram
Input signal status
Set up
as
required
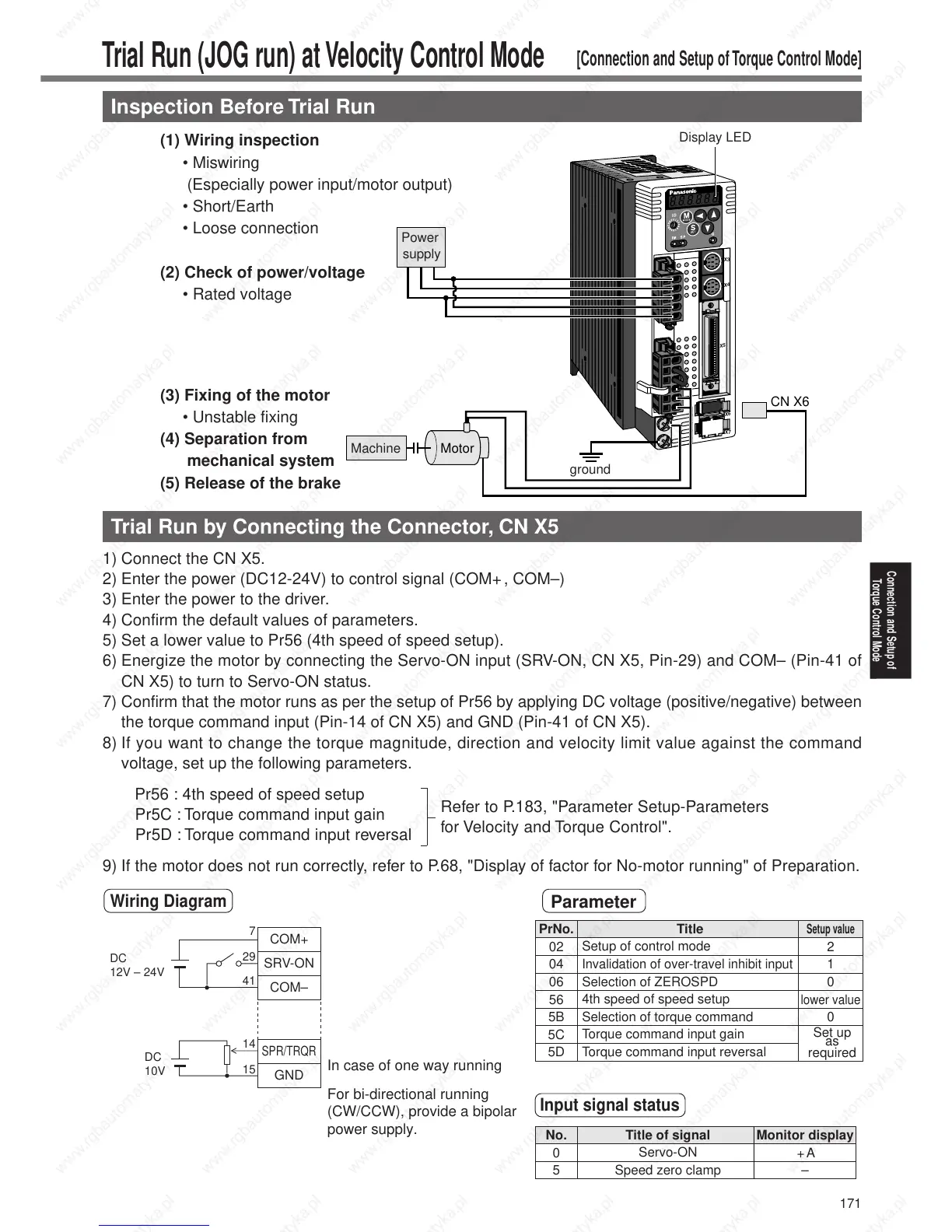
Inspection Before Trial Run
X3
X4
X5
X6
X7
Display LED
CN X6
ground
Power
supply
Motor
Machine
(1) Wiring inspection
• Miswiring
(Especially power input/motor output)
• Short/Earth
• Loose connection
(2) Check of power/voltage
• Rated voltage
(3) Fixing of the motor
• Unstable fixing
(4) Separation from
mechanical system
(5) Release of the brake
[Connection and Setup of Torque Control Mode]

 Loading...
Loading...