56
Setup of Parameter and Mode
Set up of parameter Range Unit Related Control Mode
Parameter No.
(Pr )
Default
60
61
62
63
64
65
66*1
67
68
69
6A
6B
6C*1
6D*1
6E
6F
70
71
72
73
0 to 32767
10 to 20000
10 to 20000
0 to 3
–
0 to 1
0 to 2
0 to 9
0 to 3
0 to 9
0 to 100
0 to 100
0 to 3
35 to 1000
0 to 500
–
0 to 32767
0 to 100
0 to 500
0 to 20000
131
50
1000
0
–
1
0
0
0
0
0
0
35
0
–
25000
0
0
0
Pulse
r/min
r/min
–
–
–
–
–
–
–
2ms
2ms
–
2ms
%
–
256Pulse
0.1V
%
r/min
P, F
all
S, T
P, F
–
all
all
all
all
all
all
all
all
all
all
–
P, F
S, T
all
all
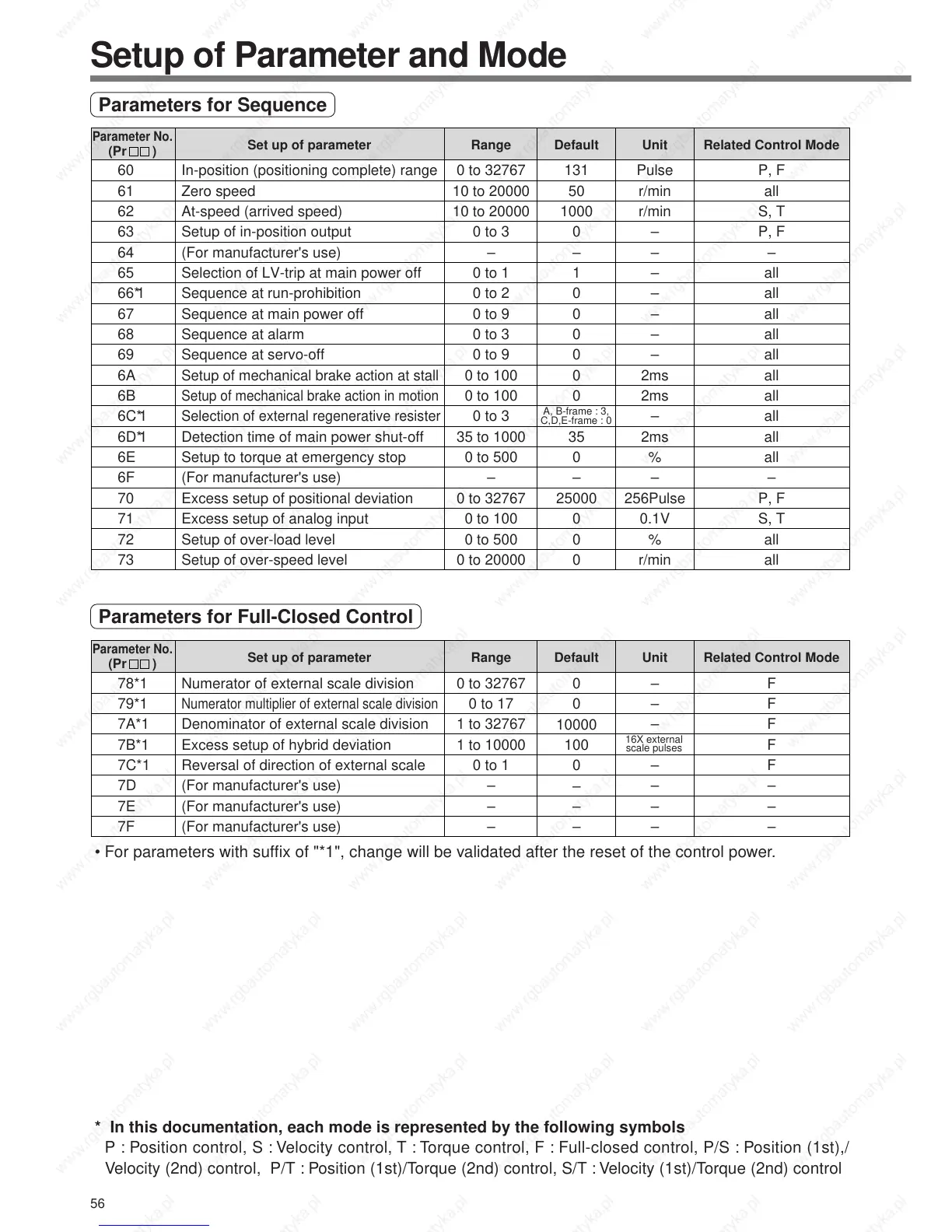
In-position (positioning complete) range
Zero speed
At-speed (arrived speed)
Setup of in-position output
(For manufacturer's use)
Selection of LV-trip at main power off
Sequence at run-prohibition
Sequence at main power off
Sequence at alarm
Sequence at servo-off
Setup of mechanical brake action at stall
Setup of mechanical brake action in motion
Selection of external regenerative resister
Detection time of main power shut-off
Setup to torque at emergency stop
(For manufacturer's use)
Excess setup of positional deviation
Excess setup of analog input
Setup of over-load level
Setup of over-speed level
A, B-frame : 3,
C,D,E-frame : 0
Parameters for Sequence
Parameters for Full-Closed Control
Set up of parameter Range Unit Related Control Mode
Parameter No.
(Pr )
Default
78*1
79*1
7A*1
7B*1
7C*1
7D
7E
7F
0 to 32767
0 to 17
1 to 32767
1 to 10000
0 to 1
–
–
–
–
–
–
–
–
–
–
F
F
F
F
F
–
–
–
Numerator of external scale division
Numerator multiplier of external scale division
Denominator of external scale division
Excess setup of hybrid deviation
Reversal of direction of external scale
(For manufacturer's use)
(For manufacturer's use)
(For manufacturer's use)
0
0
10000
100
0
–
–
–
16X external
scale pulses
• For parameters with suffix of "*1", change will be validated after the reset of the control power.
* In this documentation, each mode is represented by the following symbols
P : Position control, S : Velocity control, T : Torque control, F : Full-closed control, P/S : Position (1st),/
Velocity (2nd) control, P/T : Position (1st)/Torque (2nd) control, S/T : Velocity (1st)/Torque (2nd) control

 Loading...
Loading...