131
Replacing the Main Harness
Replacement of the Main Robot Harness is typically only performed at the factory. The Main Robot
Harness is intended to last for the life of the robot.
Replacing the Outer Link Harness
The Outer Link Harness is comprised of 3 cables: Harness, FFC, J4 Motor, (Precise P/N PF0H-MA-
00002-02-E3), Harness, FFC, J4 Encoder (Precise P/N PF0H-MA-00005-02-E3), and Harness, Gripper
Controller (Precise P/N PF0H-MA-00014).
Replacing the Outer Link Harness does not require un-mounting the robot from its surface.
The user must:
1. Remove the Inner Link Cover.
2. Remove the Outer Link Cover.
3. Unwind the Outer Link in counterclockwise direction, looking down from above the J3 axis until it
reaches the hard stop.
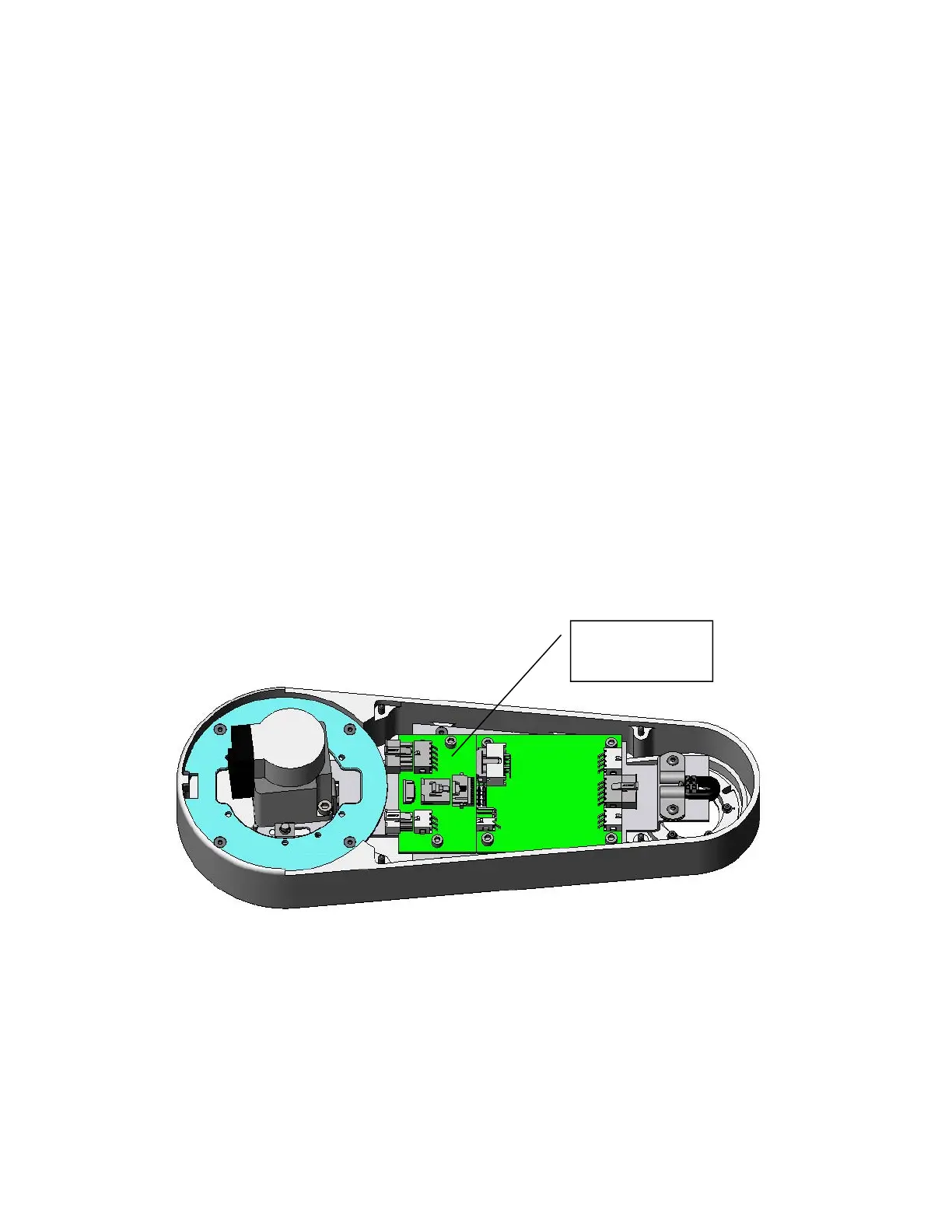
4. Release the J4 Motor Interface circuit board by removing 2 M3 X 10mm SHCS.
5. Disconnect the Outer Link Harness from the J4 Motor Interface PCA and the Guidance 1100C
Slave Controller in the Outer Link.
6. Remove the upper circuit board in the Robot Controller by removing 4 M2.5 X 6mm screws and
disconnect the harness.
J4 Motor
Interface Board