Introduction to the Hardware
31
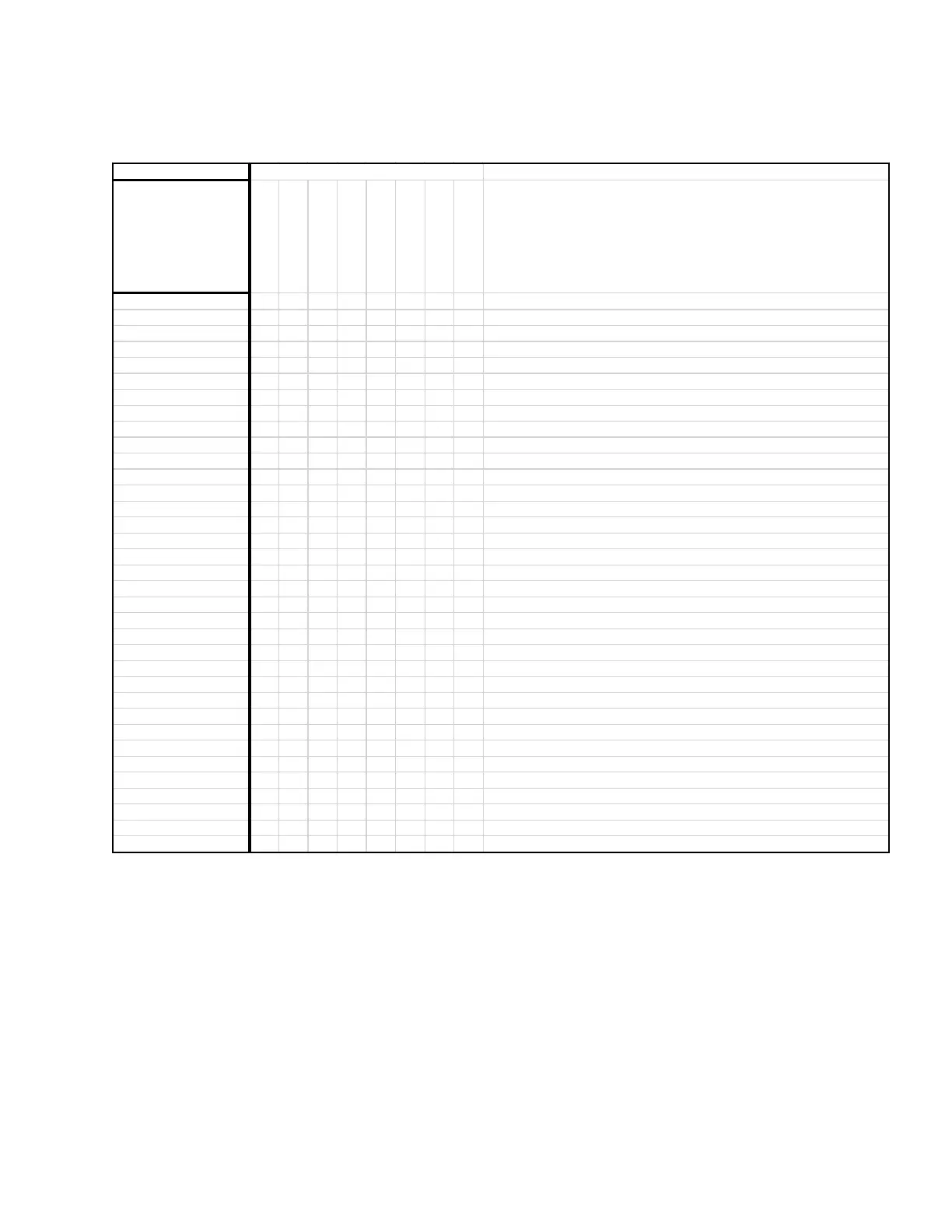
Appendix D1: Safety Circuits for PF400 500gm Payload
14‐Jun‐17
SafetyCircuit
StartupTest
1
Redund ant
ContinuousTest
DiagnosticCoverage
MTTFdl, Years
PowerOffOnFailure
PL
CategorySafety
Notes
Estop No Yes No 50% 92 Yes c 1 EstopturnsoffampenableandPWM
StoppingrobotwithhandturnsoffampenableandPWMtoamp
EncoderFeedback Yes No Yes 90% 58 Yes d 3 Startuptestchecksencodercommunication,preventsmtr poweriffault
Serialupdateat8Khzwchecksum,commcheck,accelcheck
Counterembe ddedinposition wordtoconfirmCPUreadfromFPGA
CPUMonitor No No Yes 99% 100 Ye s d 1 FPGA
watchdogtimerturnsoffampenableandPWM
PositionEnvelopeError Yes Yes Yes 90% 57 Yes d 3 Startuptestchecksencodercommunication,preventsmtrpoweriffault
Serialupdateat8Khzwchecksum,commcheck,accelcheck
SWwatchdoginservoloopturnsoffampenable,PWMand48V
Counterembe ddedinposition wordtoconfirmCPUreadfrom
FPGA
PowerampFault Yes Yes Yes 90% 100 Yes d 3 Startuptestconfirmszerocurrentwhen48Venabled
Excesscurrenttogroundorphasetophasetriggersshutdownin10usec
SaturatedPIDcurrentcommandtrigge rsshutdownin.050sec
Shortedtransistorjustlocksupbrushlessmotor
CollabForceLimit Yes Yes Yes 90% SW Yes d 3 Tests2,3,4abovetestHW.Motordrive nagainstbrak e
totestSWcurrentl
Currentsaturationtriggersseparatefault,turnsoffampenableandPWM
MonitorfunctionwithWDturnsoffampenableandPWMtoamp
AssymetriccurrentlimitslimitZforceevenwithgra vityload
VelocityRestrict Yes Yes Yes 99% 93 Yes d 3 Startuptest,setsflagtotriggerthiserror,thenresets
Checksvel ocitylimitin
FPGAinadditiontocheckinCPUservosoftware
1.Cat2andCat3requirestartuptes tbeforeenablingmotorpower
PF40050 0gm