PreciseFlex_Robot
72
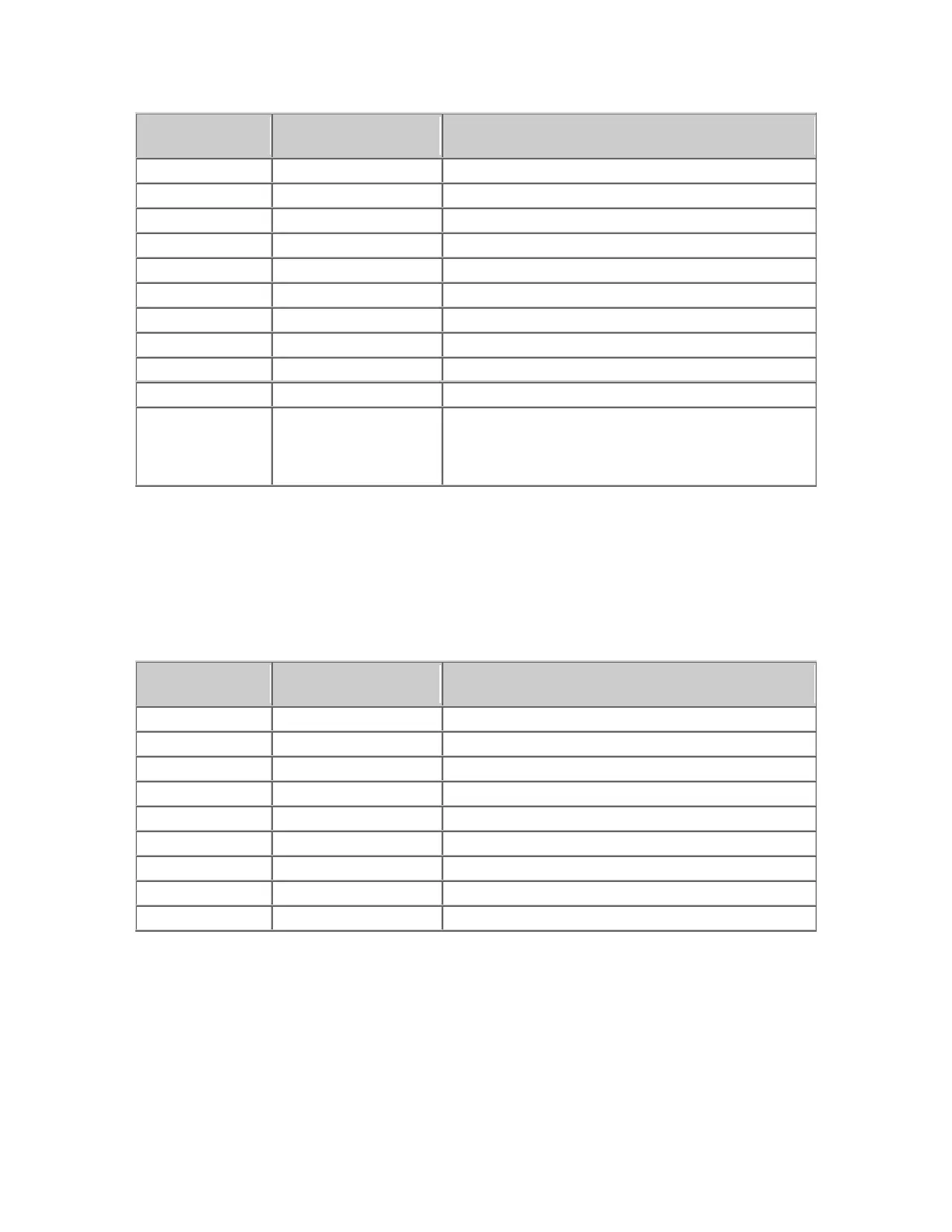
Pin
GPL Signal
Number
Description
1 13 Di
ital Output 1
2 14 Di
ital Output 2
3 15 Di
ital Output 3
4 16 Di
ital Output 4
5 GND
6 24 VDC output
7 10001 Di
ital Input 1
8 10002 Di
ital Input 2
9 10003 Di
ital Input 3
10 10004 Di
ital Input 4
User Plug Part No
AMP 1658622-1 or Molex 22-55-2101 or 90142-
0010. For the Molex plug, use Molex sockets 16-02-
0103 or 90119-2110 and Molex crimp tool 63811-
1000.
Gripper Controller Digital Inputs and Outputs
If the robot is equipped with an electric gripper, the gripper controller includes 3 sinking digital inputs and
3 sourcing digital outputs. One digital input and one digital output are dedicated for a lighted teach
button on some electric grippers. The other two inputs and outputs are available in the outer link for
application use.
Pin
GPL Signal
Number
Description
1 200013 Di
ital Output 1/LED driver
2 200014 Di
ital Output 2
3 200015 Di
ital Output 3
4 24 VDC output
5 GND
6 210001 Di
ital Input 1
7 210002 Di
ital Input 2
8 210003 Di
ital Input 3
User Plu
Part No
mp 794617-8, crimp contacts 1-794611-2
RS485 Remote IO Module (GIO)
Customers who need additional digital IO may order the RS485 Remote IO Module. This module installs
in the base of the robot and provides 12 Digital Inputs and 8 Digital Outputs in a 25 pin Dsub connector.