PreciseFlex_Robot
142
10. Remove round Pulley Mount Plate from the Inner Link by removing 5 M3 X FHCS.
11. Remove the J3 Controller Mount Plate from the Inner link by removing 4 M3 X 5 SHCS.
12. Remove the J3 motor by removing the 2 M4 Screws attaching the motor to the motor mount
plate, and rotate the motor up and out of the motor mount plate. This procedure will preserve the
belt tension and avoid having to use a tension meter to reset the belt tension, as it preserves the
position of the motor mount plate.
13. Replace the J3 motor, using Loctite 243, or optionally, replace the J3 timing belt if necessary.
Since the motor mount plate has not been removed, the belt tension should not need to be
adjusted.
14. If a Belt Tension Meter is available, check the belt tension per Appendix D. Check the belt
tension every 10 degrees of rotation of the J3 output pulley and set the belt tension at its lowest
point to the minimum value in Appendix D.
15. Replace the pulley mount plate using Loctite 222 and re-assemble the robot.
16. Re-calibrate the robot.
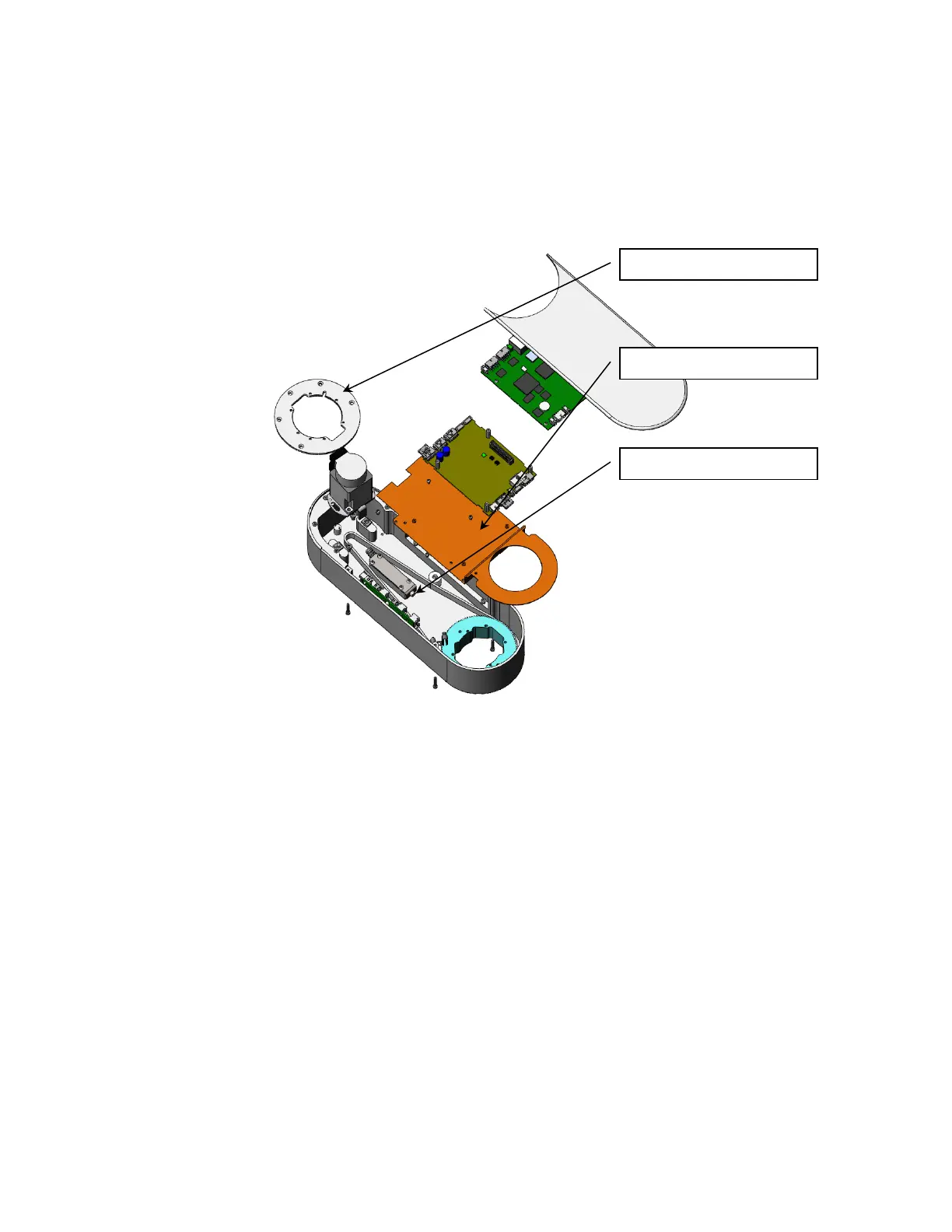
Pulley Mount Plate.
Controller Mount Plate.
Belt Tension Screw.