Rockwell Automation Publication 2198-UM005C-EN-P - February 2022 163
Chapter 9 Kinetix 5300 Safe Torque Off Function
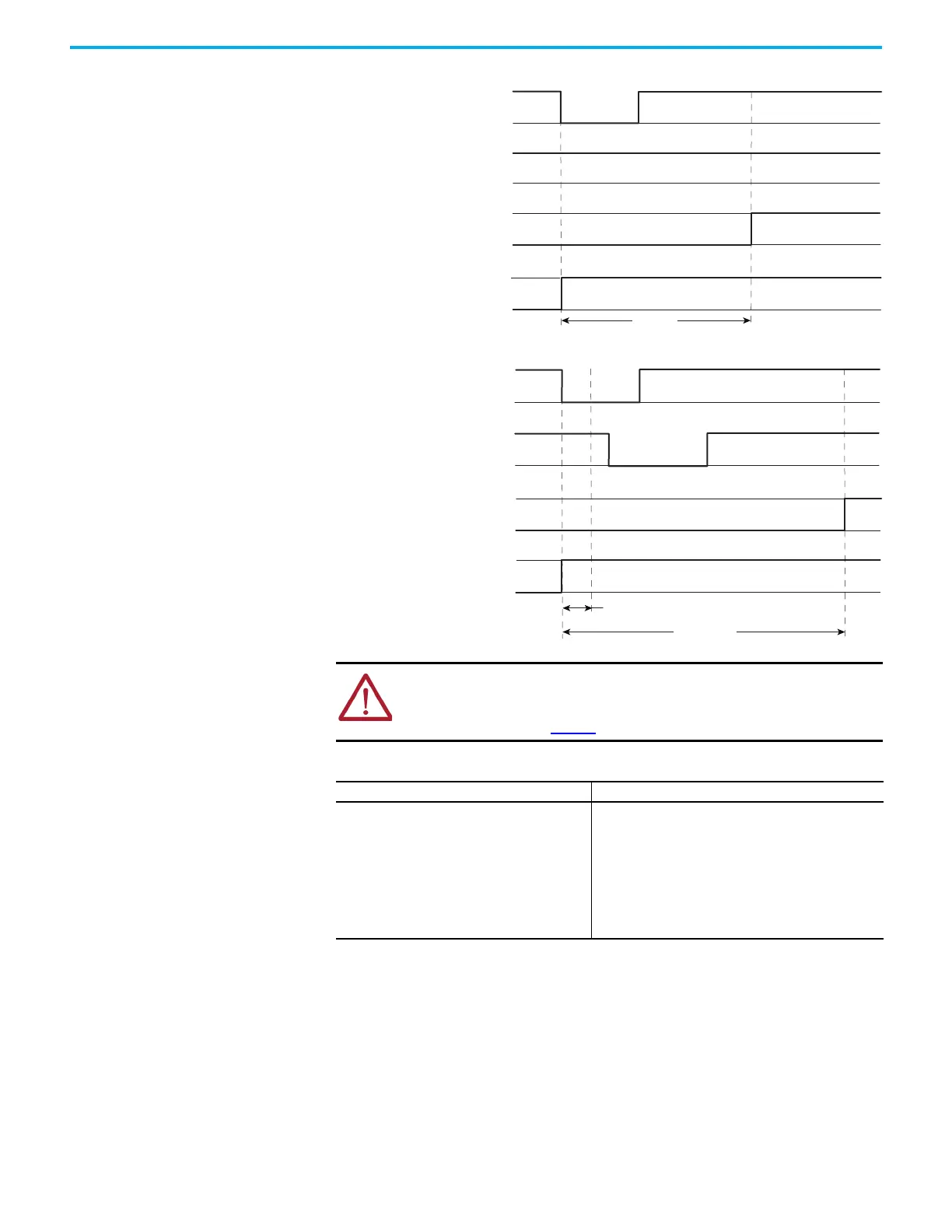
Figure 71 - System Operation in the Event of STO Inputs Discrepancy (fault case 2)
Figure 72 - System Operation in the Event of STO Inputs Discrepancy (fault case 3)
Table 82 - Troubleshoot Hardwired STO Function
24V DC
24V DC
0V DC
0V DC
1
1
0
0
1 second
GuardStopRequestStatus
GuardStopInputFault
SS_IN_CH0
SS_IN_CH1
24V DC
24V DC
0V DC
1
1
0
0
100 ms
0V DC
1 second
GuardStopRequestStatus
GuardStopInputFault
SS_IN_CH0
SS_IN_CH1
ATTENTION: The Safe Torque Off (STO) fault is detected upon demand of the
STO function. After troubleshooting the STO function or performing maintenance
that might affect the STO function, the STO function must be executed to verify
correct operation. See Table 82
for troubleshooting information.
Safe Torque Off Function Input Discrepancy Corrective Action
System does not allow motion. Safe torque-off input
discrepancy is detected when safety inputs are in a
different state for more than 1.0 second.
• Verify safety wiring and connections:
– Wire terminations at safe torque-off (STO) connector
– Cable/header not seated correctly
– +24V power within specified limits
• Check state of safety inputs.
• Reset error and execute STO function to verify that the
function operates properly.
• If error persists, remove the drive from service immediately
and return to Rockwell Automation.

 Loading...
Loading...











