202208081959/V0.1
2 Safety
xMate ER7Hardware Installation Manual 5
Use before performing a risk assessment
Use outside of stated specifications
Use as a climbing aid
Operation outside the permissible operating parameters
2.2 Safety notice
2.2.1 Instructions
A risk assessment must be conducted before operating or controlling the robot, and
the robot must be used according to the safety instructions described in this
document.
When the robot is controlled by an external controller using RCI, the safety
protection during the control process must be implemented by the external
controller. Any personal or device safety issues caused by the lack of safety features
in the external controller are not covered by robot safety management.
If you are unsure about the risks during the use of the robot, please contact ROKAE
Technical Support. Problems arising from non-intended use are not covered by our
support.
2.3 Safety protection devices
2.3.1 Emergency stop
2.3.1.1 Definition of emergency stop
Emergency stop possesses the highest priority in the robot system. Pressing the
emergency stop button will trigger the emergency stop and all the functions will be frozen
immediately. The robot will stop running and the power of each joint will be cut off. The
control system will be switched into the emergency stop state, which will be maintained
before releasing the emergency stop manually.
To resume the operation, release the emergency stop button first for the motor of each
joint to execute the power-on command.
Notes
Emergency stop should not be used for normal stops, otherwise it may cause extra and
unnecessary wear to the brake and transmission system, which will eventually reduce
the robot's lifespan.
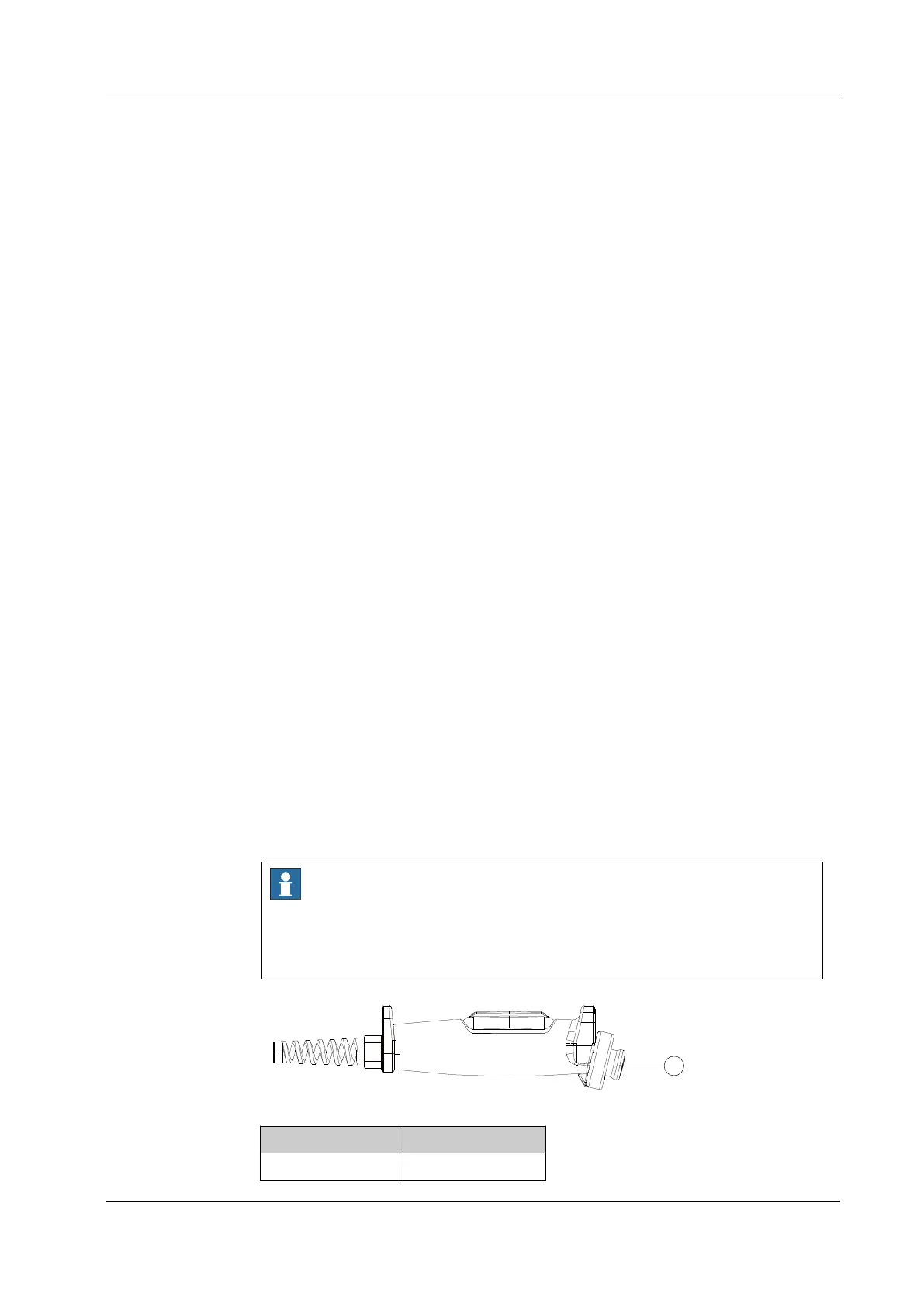
Figure 1. Emergency stop button on the handheld emergency stop and enabling device
No. Name
1 Emergency stop

 Loading...
Loading...