6 Electrical Connections
202208081959/V0.1
26 xMate ER7Hardware Installation Manual
enabling device
Notes
For information on how to control and use the xMate ER7 robot, see the user manual
of the robot software.
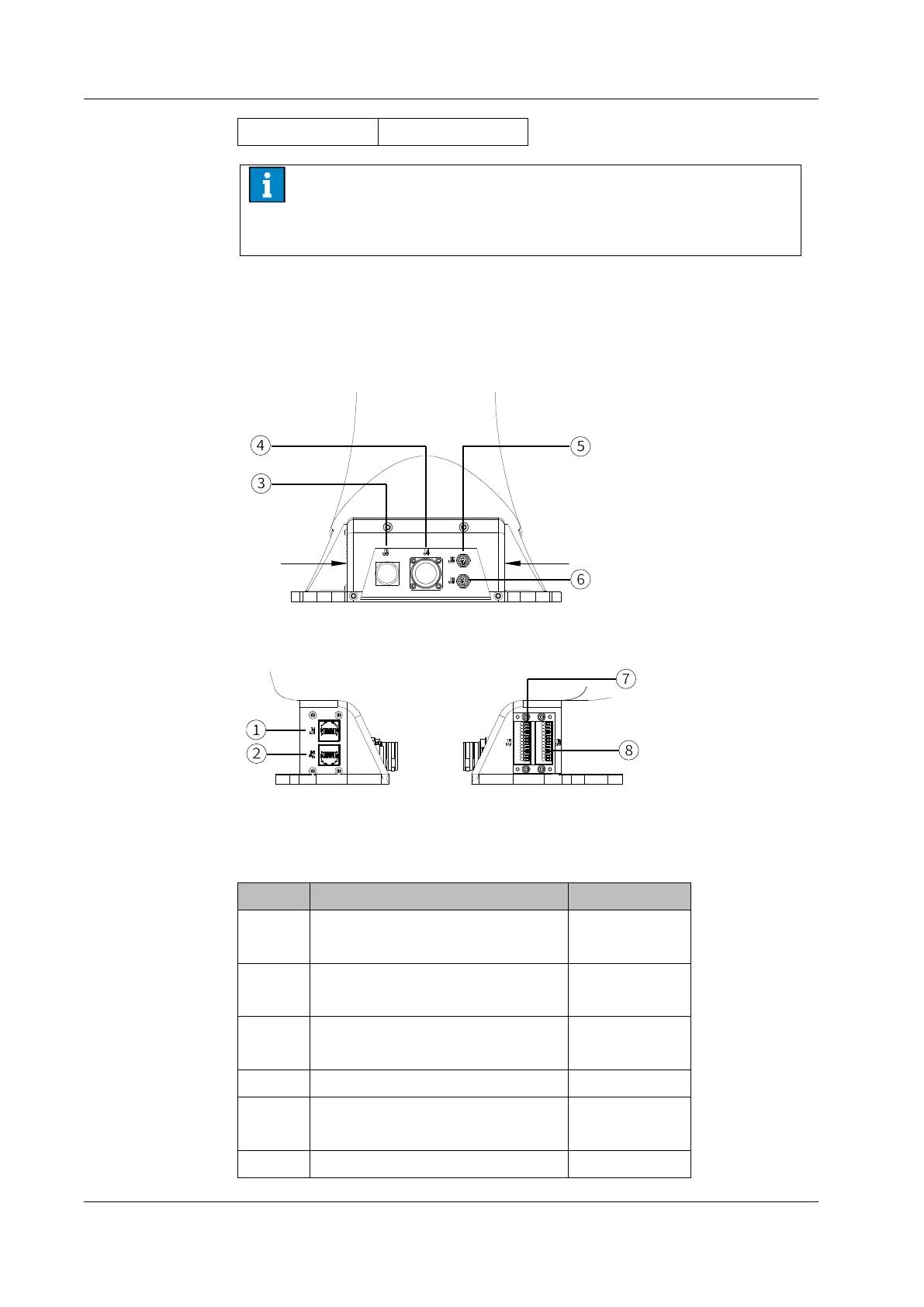
6.2 Robot base
This section describes all the inbound and outbound interfaces on the robot base.
A
B
A向
B向
Figure 16. Base interface layout
No. Meaning Label on base
1 Extended EtherNet interface (custom
IP address)
J1
2 Extended EtherNet interface (fixed IP
address)
J2
3 Power-on button and indication
interface
J3
4 Robot power supply interface J4
5 Handheld emergency stop and
enabling device interface
J5
6 EtherCAT servo drive debug interface J6
 Loading...
Loading...