202208081959/V0.1
6 Electrical Connections
xMate ER7Hardware Installation Manual 35
confirmation
4 Move the cursor forward in the list
5 Delete a point/track in the list, and a pop-up window prompts
you to cancel
6 In manual mode, press the two enable buttons at the same
time to enable the drag function
6.2.9 Tool interface
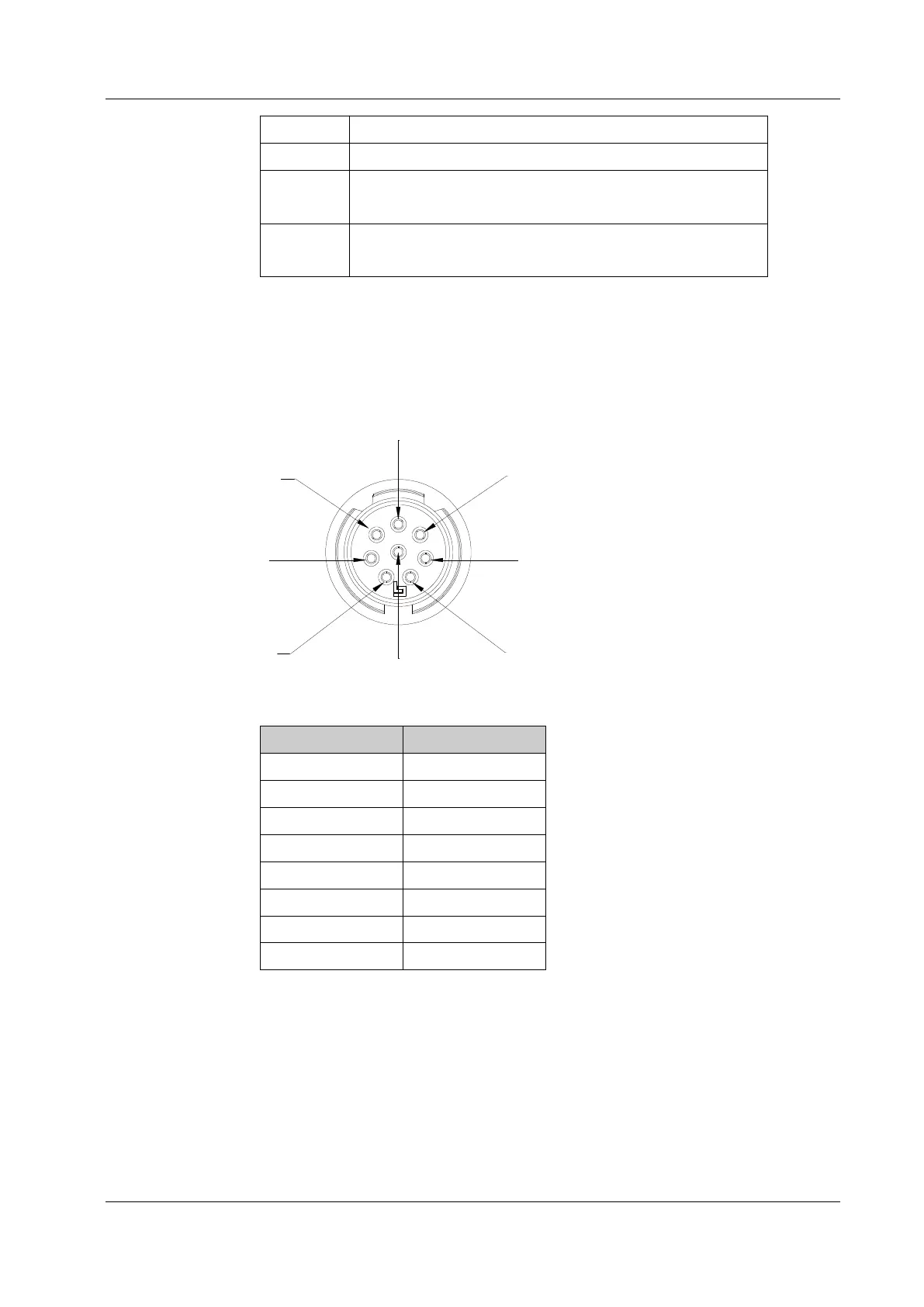
Adjacent to the tool flange on the robot wrist, there is a round connector that provides the
extended electrical interface for the robot end effector. A special-purpose gripper of the
xMate ER7 robot can be used as the end effector in this interface.
1
3
5
7
8
2
Figure 29. The wrist round connector interface
No. Definition
1 VCC24V
2 GND
3 DI_0
4 DI_1
5 DO_0
6 DO_1
7 RS485A
8 RS485B
6.2.9.1 Special-purpose tool IO
The xMate ER7 robot supports the use of a special-purpose gripper as the end effector.
The electrical and special-purpose communication interfaces of the gripper are integrated
into this connector.
6.2.9.2 General-purpose tool IO
This connector provides power and control signals for grippers and sensors used on a
 Loading...
Loading...