202208081959/V0.1
6 Electrical Connections
xMate ER7Hardware Installation Manual 33
Frequency
of use
Infrequent Infrequent
Warning
All safety-related I/Os are constructed redundantly (two
independent channels). Keep the two channels separate so that
a fault on one channel will not cause the failure of the safety
function.
Be sure to check the safety functions before putting the robot
into operation. The safety functions must be checked regularly.
The robot must be installed in compliance with these
specifications. Failure to do so could result in serious injury or
death as the safety function could be overridden.
Attention
[1] This is not supported by the XM3p-R760-B0S0 model.
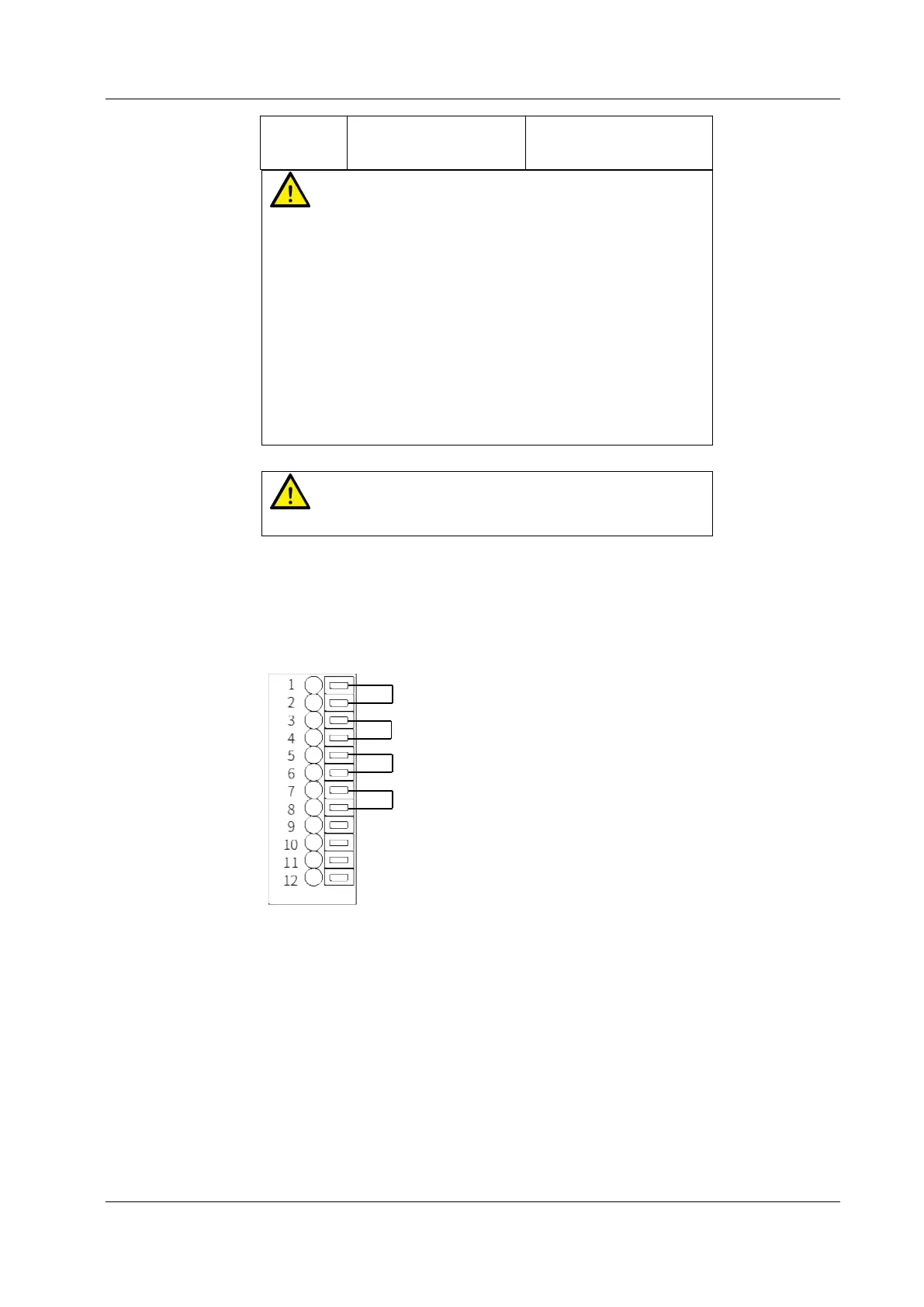
Default safety configuration:
All safety function input and status output signals are controlled via two channels. The
external emergency stop and safeguard stop functions are short connected when leaving
the factory and enable operation without any additional safety equipment.
Figure 26. Short connection wiring diagram
The robot is delivered with a default configuration. Integrators can connect the safety
protection devices to the safety DIO as needed at the site.
6.2.5.2 Safety DO
Every safety DO has two channels to provide feedback on the safety input status of external
emergency stop devices. When an external emergency stop or handheld emergency stop
occurs, the feedback loop between A and B of both two channels is disconnected. When no
external emergency stop occurs, the loop is short connected.
6.2.6 Extended EtherNet interface
 Loading...
Loading...