202208081959/V0.1
6 Electrical Connections
xMate ER7Hardware Installation Manual 25
6 Electrical Connections
6.1 Electrical layout
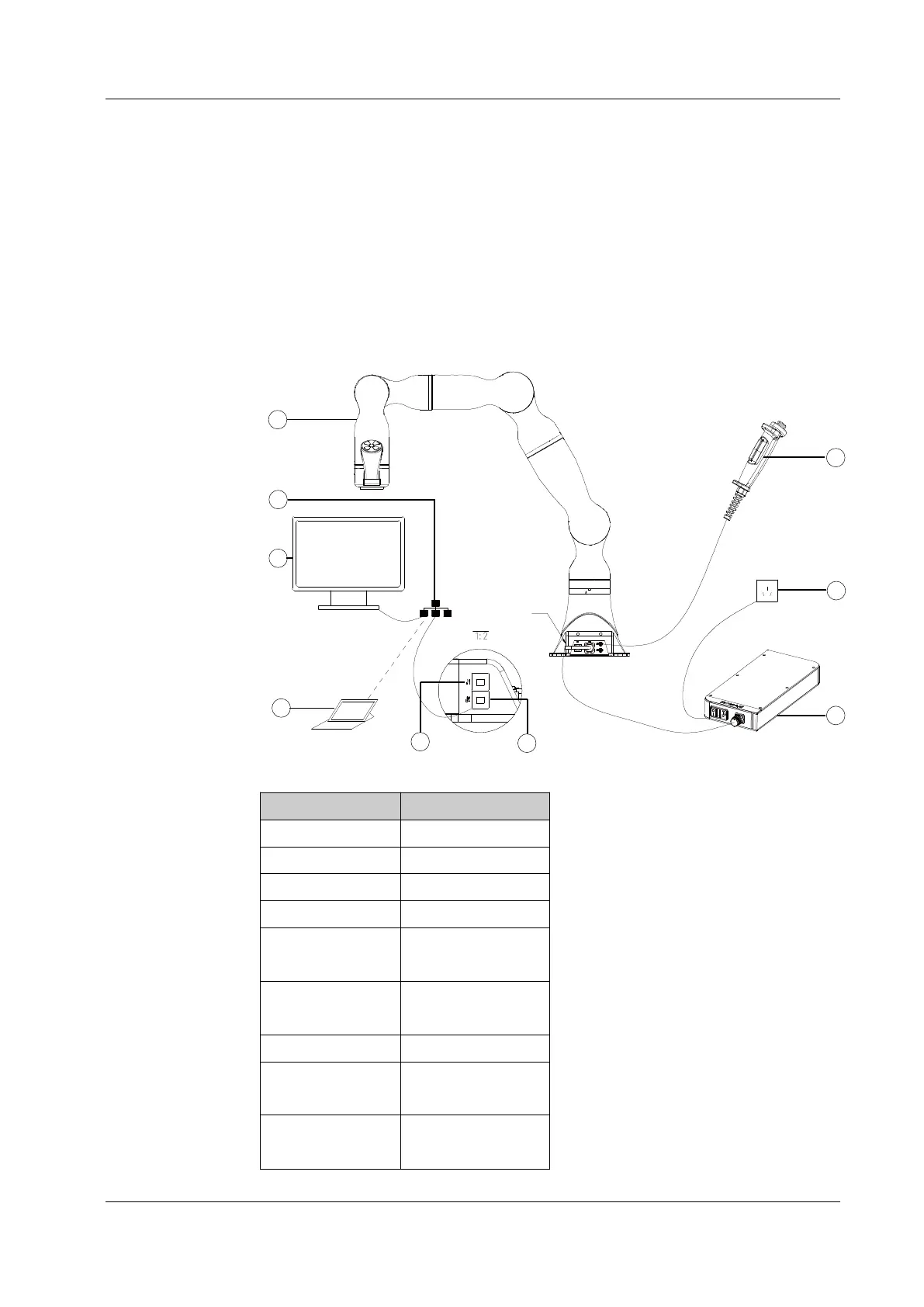
This section describes the usage of all the electrical and operation interfaces of the xMate
ER7 robot and its related devices. The xMate ER7 robot comes with a handheld
emergency stop and enabling device that integrates an optional power adapter to supply
power to the robot. The network interfaces are used to connect the robot to an external
network or to a pad or PC that has the xMate ER7 software installed for control and
debugging of the robot.
A
A
Pad
PC
Figure 15. Electrical layout
No. Name
1 xMate ER7 robot
2 External network
3 PC
4 Pad
5 J1 network interface
(custom IP address)
6 J2 network interface
(fixed IP address)
7 Power adapter
8 External power
supply
9 Handheld
emergency stop and
 Loading...
Loading...