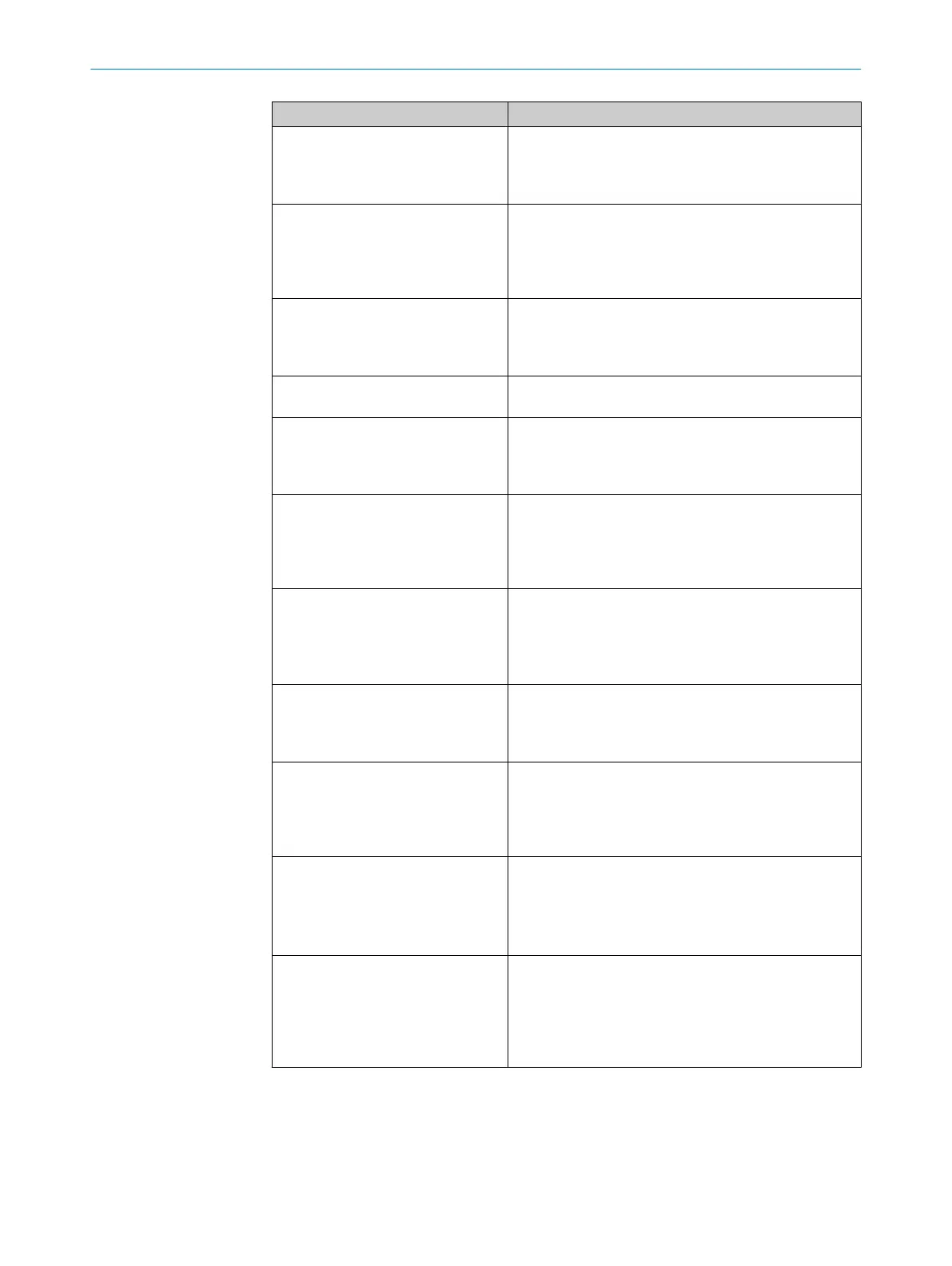
Command Description
Alignment.Align,
alignment,x,y,z,r1,r2,r3
Acquire a new image and align sensor to work plane
alignment target using robot position.
Robot coordinates should only be used if the sensor is
mounted to the robot arm.
Alignment.HandEye.Pose.Add
,x,y,z,
r1,r2,r3,pose
Acquire a new image and collect information on sensor
position in relation to alignment target and robot. Up to
32 poses can be collected.
This command is only used if the sensor is mounted to
the robot arm.
Alignment.HandEye.Calculat
e
Calculate how the sensor is mounted to the robot arm. At
least three poses are needed.
This command is only used if the sensor is mounted to
the robot arm.
Alignment.LocateTarget,ali
gnment
Acquire a new image and locate the work plane align‐
ment target.
Alignment.Verify,alignment
Acquire a new image and compare the located target
position with the original alignment. The alignment verifi‐
cation threshold parameter is used to determine if the
difference is acceptable.
Job.Export,job,destination
Export a job to an FTP server. Only one job at a time can
be exported. The parameter destination specifies
the location on the FTP server as a relative path to the
FTP server home folder. The destination folder is created
as a sub-folder in the FTP server's home folder.
Job.Import,job,source
Import a job from an FTP server. Only one job at a time
can be imported. The parameter job specifies what
job ID the imported job will use. The parameter source
specifies the name of the job folder on the FTP server as
a relative path to the FTP server home folder.
Job.PartReferencePoint.Set
,job,x,y,z,r1,r2,r3
Change the part reference point to the current robot
gripper tool center point.
This command is only used if the sensor is mounted to
the robot arm.
Run.Locate,job
Acquire a new image and attempt to locate the parts
from the specified job. More than one job can be speci‐
fied.
If no job is specified, the command locates all config‐
ured jobs and returns the first result.
Run.Locate,job,match
Return a result from the previous Run.Locate com‐
mand. The result to return is specified by the match
parameter.
No new image is acquired when using the Run.Locate
command with the match parameter.
Run.LocateAll,job
Acquire a new image and attempt to locate the parts
from the specified job. More than one job can be speci‐
fied. If no job is specified, the command locates all con‐
figured jobs.
All results from all used jobs are returned as a comma-
separated list.
OPERATION 7
8020736/1K3Z/2023-06 | SICK O P E R A T I N G I N S T R U C T I O N S | PLOC2D 4.1
61
Subject to change without notice