Modes and Jobs
9-4
FM 351 Positioning Module
C79000-G7076-C351-02
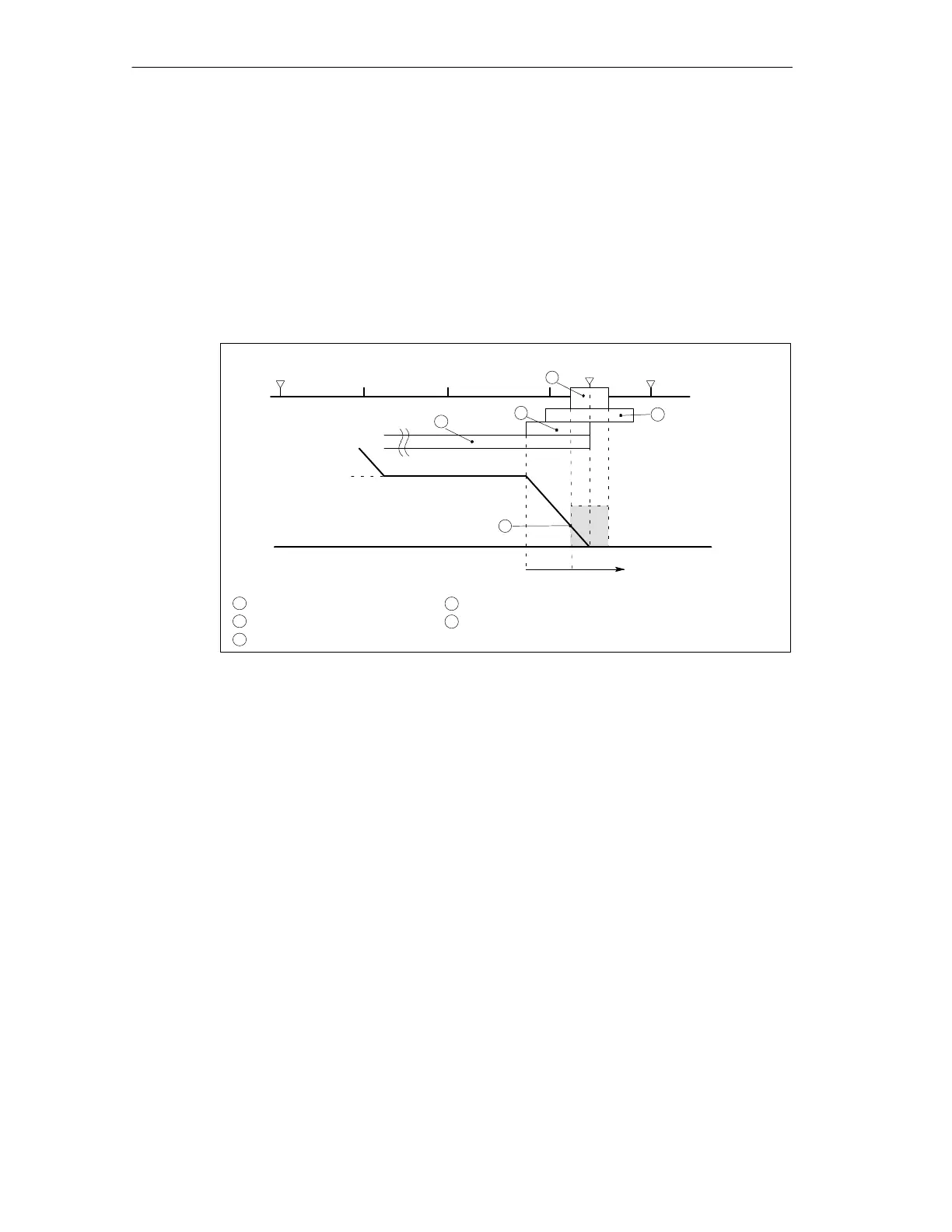
2. You have set the following parameters:
– Target range (TRG_RANGE) > 0
– Stationary speed (ZSPEED_L) = 0
– Monitoring time (MON_TIME) > 0
PEH is generated when the target range is reached.
PEH is not generated if the actual value does not reach the target range within
the monitoring time.
Target
–1000 mm 1000 mm0
Switchover difference plus
Switch-off difference plus
1
2
3
4
Target range
Stationary range
v
creep
5
t
m
Target range reached with v
still
: PEH is set
t
m
= monitoring time
4
5
1
2
3
Figure 9-2 Final Target Approach of an Incremental Approach
3. You have set the following parameters:
– Target range (TRG_RANGE) = 0
– Stationary speed (ZSPEED_L) > 0
– Monitoring time (MON_TIME) > 0
PEH is generated when the speed falls below the stationary speed and the
target is reached.
PEH is not generated if the actual value does not reach the target during the
monitoring time or the target range is passed without the speed falling below
the stationary speed.