Basic functions
4.1 Encoder settings
Connection of the SINAMICS S120 to the Technology CPU
Product Information, 09/2011, A5E00480378-04
95
Example:
The position value of an absolute encoder is set in the PLC as follows:
1. The PLC uses a command to request the absolute value of the encoder from the
drive unit.
2. The drive unit reads the absolute value from the encoder.
3. The absolute value of the encoder is returned by the drive unit in the
"absolute actual value" Gn_XIST_2 (n = 1 or 2, number of the encoder) to the PLC.
4. The PLC fills the position value of the axis with the reported absolute value of the
encoder.
All other position changes of the axis are now reported to the PLC via the "cyclical actual
value" Gn_XIST_1 (n = 1 or 2, number of the encoder) of the encoder.
Note
The data bits of the "absolute actual value" Gn_XIST_2 (n = 1 or 2, number of the encoder)
must correspond to the structure of the encoder actual value that was configured in
S7T Config. Otherwise, the position information transferred from the encoder to the PLC
will be incorrectly interpreted by the technology CPU.
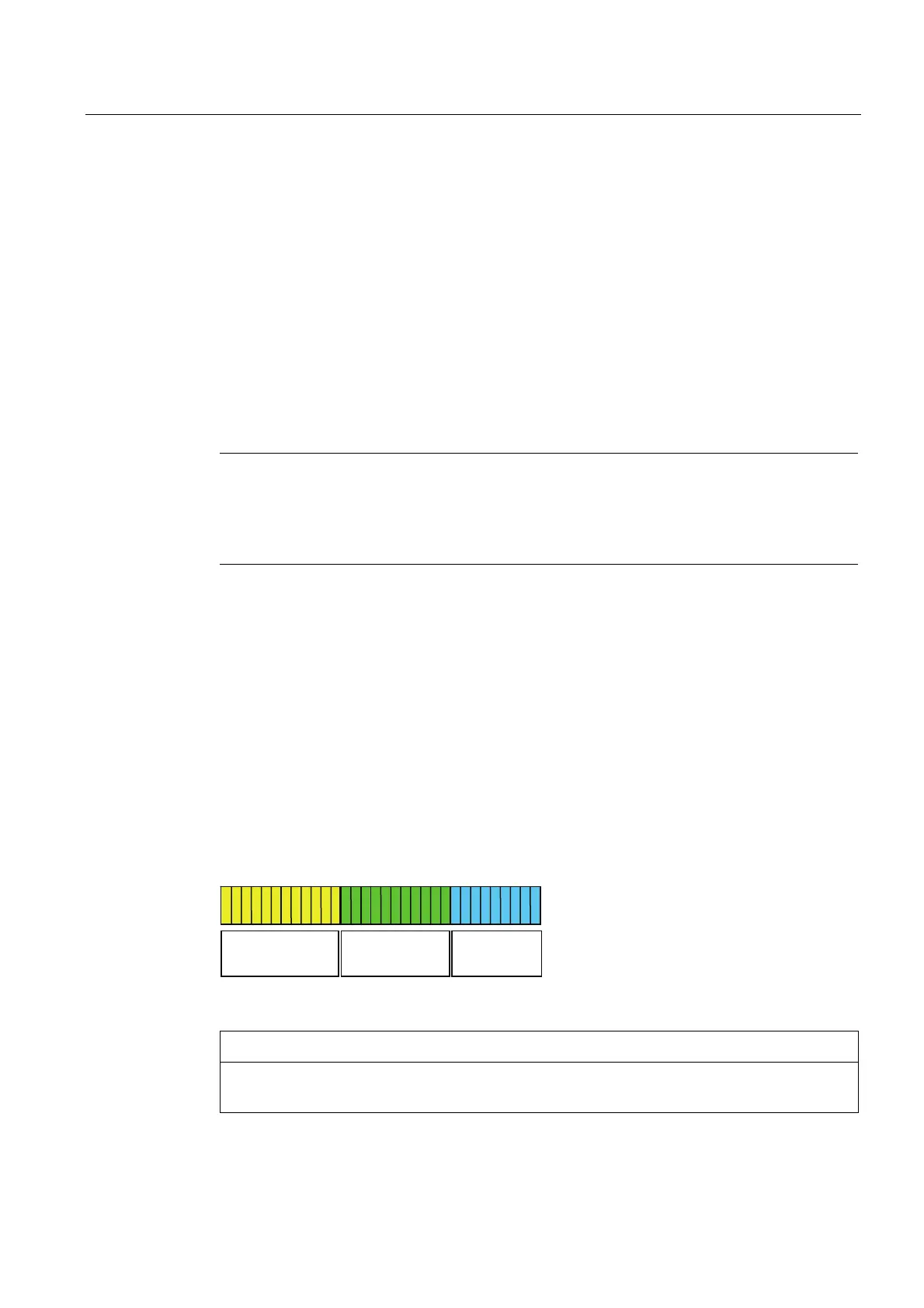
4.1.3 Structure of the encoder actual values
Structure of the encoder actual value
The following information is contained in the encoder actual values of the
"cyclical actual value" Gn_XIST_1 (n = 1 or 2, number of the encoder), and the
"absolute actual value" Gn_XIST_2 (n = 1 or 2, number of the encoder):
● Multiturn information (only with Gn_XIST_2)
● Encoder pulse count
● Fine resolution
0XOWLWXUQ
LQIRUPDWLRQ
(QFRGHU
SXOVHFRXQW
)LQH
UHVROXWLRQ
NOTICE
The position of the data in the encoder actual value is not fixed; it depends on the values
set for the encoder pulses per revolution and the fine resolution.

 Loading...
Loading...




















