Getting Started
A5E37208904-003, 04/2017
63
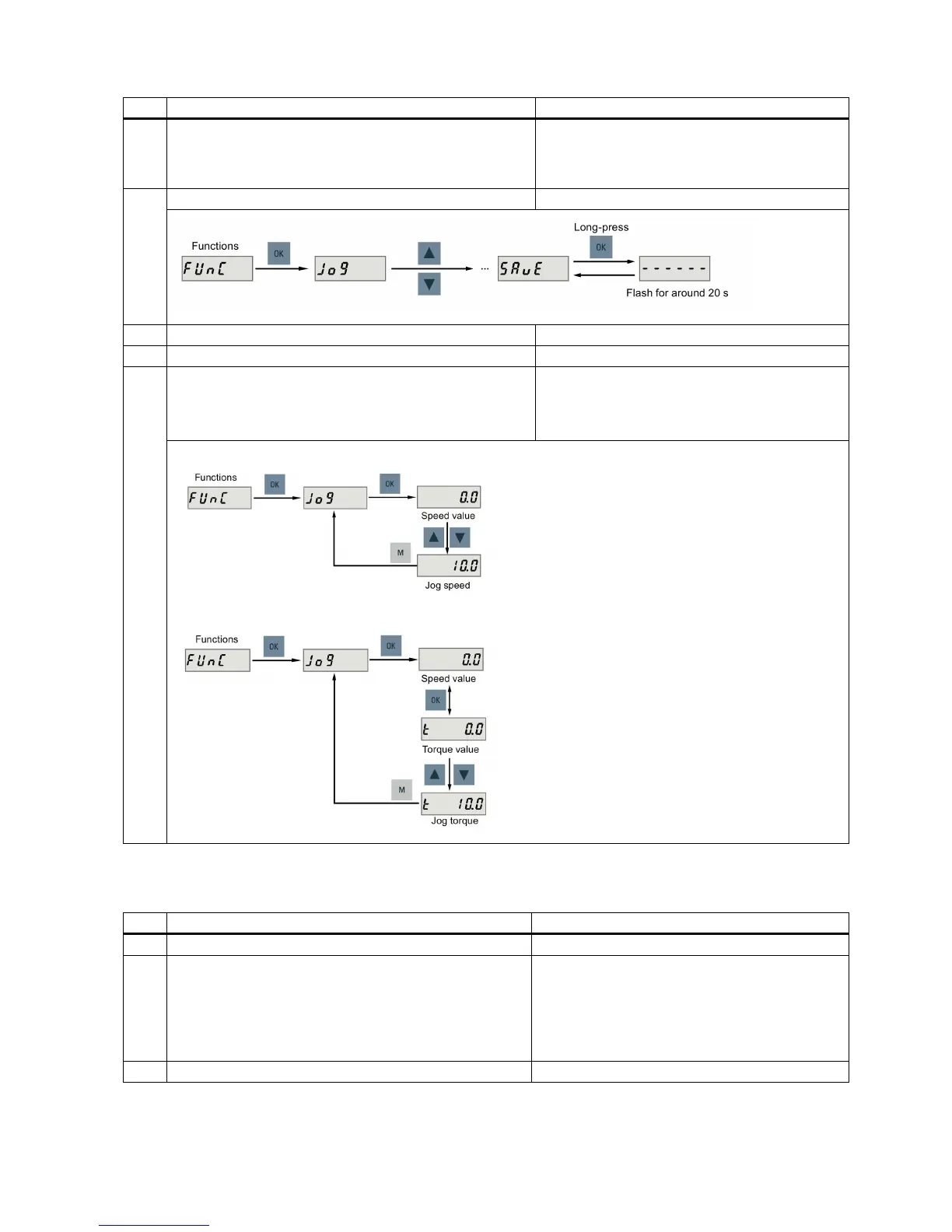
5 Check the JOG speed.
The default JOG speed is 100 rpm. You can change it by
setting the parameter p1058.
Set bit 0 of parameter p29108 to 1, and then save
the parameter setting and restart the drive, to ena-
ble the JOG function; otherwise, you cannot access
Save parameters with the BOP.
7 Switch on the main line supply.
Refer to "Diagnostics (Page 114)".
9 For the BOP, enter the JOG menu function and press the
button to run the servo motor.
For the engineering tool, use the JOG function to run the
For more information about JOG with SINAMICS V-
ASSISTANT, see SINAMICS V-ASSISTANT Online
Help.
Commissioning in basic positioner control mode (EPOS)
The following takes the EJOG function for example to describe the commissioning in EPOS mode.
Switch off the main line supply.
2 Power off the servo drive and connect it to the controller (for
example, SIMATIC S7-1500) with the PROFINET cable and
signal cable.
If any one of digital signals EMGS, CWL, and CCWL
is not assigned to a DI, it will be set to a high level
(1) automatically.
If you have assigned any one of digital signals
EMGS, CWL, and CCWL to a DI, keep it at a high
level (1).
Switch on the 24 VDC power supply.

 Loading...
Loading...









