Getting Started
66 A5E37208904-003, 04/2017
Note
After the motor is commissioned, p1082, p1083, p1086, p29070 and p29071 are set to the maximum speed of the motor
automatically.
Two sources in total are available for the torque limit. You can select one of them via the digital input signal TLIM:
When the torque setpoint reaches torque limit, the torque is limited to the value selected by TLIM.
Note
You can switch between the two sources and modify their values when the servo drive is running.
Besides the above two sources, an overall torque limit is also available. The overall torque limit takes effect when an
emergency stop (OFF3) happens. In this case, the servo drive brakes with a maximum torque.
You can configure the overall torque limit by setting the following parameters:
-1000000.00 to 20000000.00
Overall torque limit (positive)
p1521 -20000000.00 to 1000000.00 0 Nm Overall torque limit (negative)
Select an internal torque limit by setting the following parameters:
Internal torque limit 1 (positive)
Internal torque limit 2 (positive)
p29051[0] -300 to 150 -300 % Internal torque limit 1 (negative) 0
Internal torque limit 2 (negative)
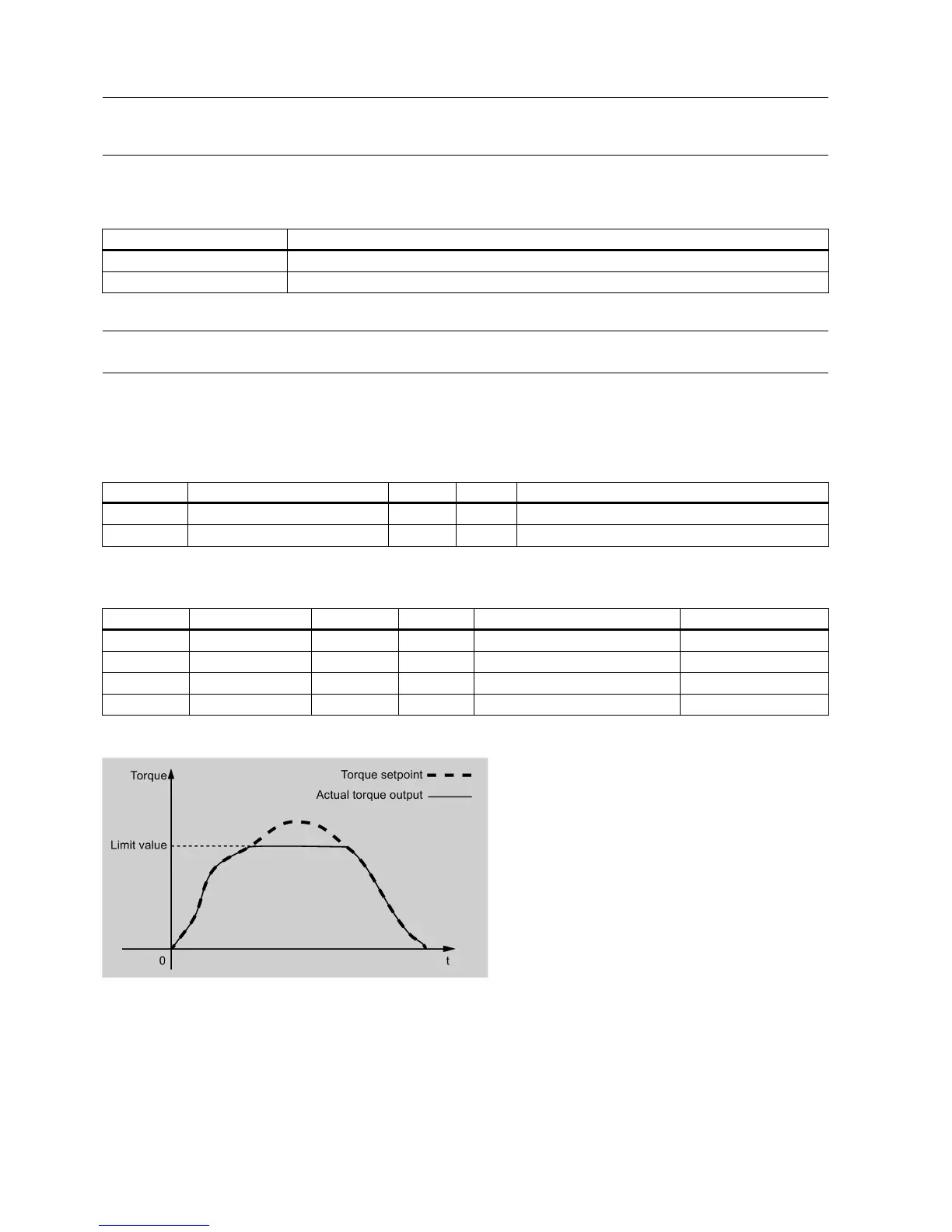
The following diagram shows how the internal torque limit functions:
Torque limit reached (TLR)
When the generated torque has nearly (internal hysteresis) reached the value of the positive torque limit or negative torque
limit, the signal TLR is output.

 Loading...
Loading...









