Description
3.3 Technical features and system requirements for built-in motors
SIMOTICS M-1FE2 built-in motors
Hardware Installation Manual, 04/2020, A5E50074509B AA
45
The winding of the 1FE218x for the connection of the free cable ends of the same phases is
a parallel circuit from two partial windings.
This produces the following conversion:
1
2
EMF
E1 =
E2 =
E
T1
T2
T
1
2
1
2
Torque M
1
= M
2
= M/2
1
2
1
2
1
2
The indexes refer to the winding halves 1 or 2. The value without index designates the value for the
complete motor.
The connection cables and the water quantity are halved on the hardware.
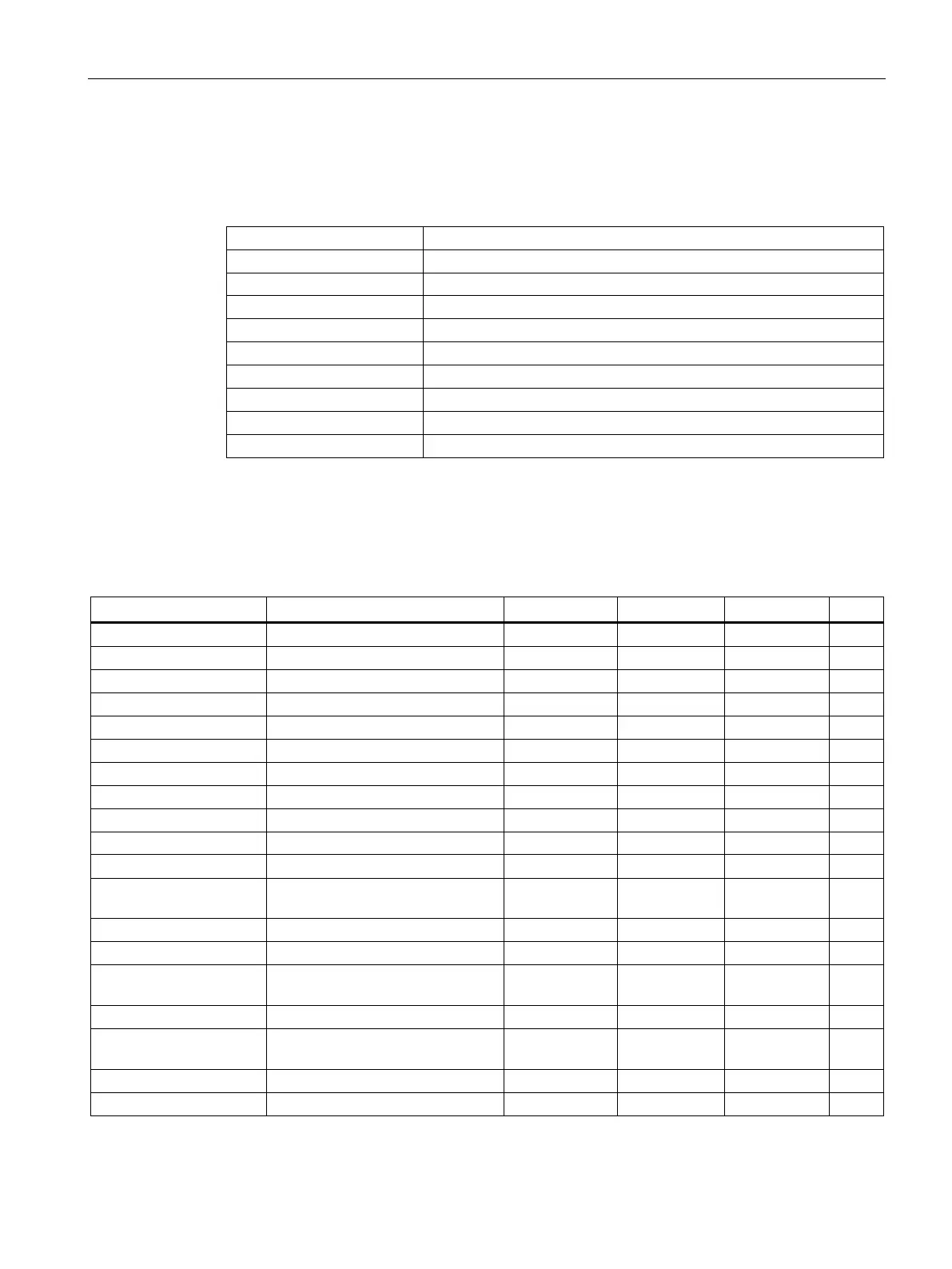
Example for the conversion of the converter setting data of a 1FE2184-8.H in master-slave
operation (specification per winding):
'Enable/disable encoder interface
Parameters(319, 0) 'Motor static torque 1020 510 510 6)
Parameters(320, 0) 'Motor rated magnetizing current /
244 122 122 6)
Parameters(322, 0) 'Maximum motor speed 2000 4200 4200 6)
Parameters(325, 0) 'Motor pole position identification
14.1 7.05 7.05 6)
'Motor stall torque correction factor
Parameters(329, 0) 'Motor pole position identification
141 70.5 70.5 6)

 Loading...
Loading...