Parameterizing Steps 05.2006
6SE7087-2JD60 Siemens AG
9-64 Operating Instructions SIMOVERT MASTERDRIVES
In exceptional cases this is not necessary:
♦ If P068 is only adjusted between 0 and 2 (dv/dt filter).
♦ If P340 is adjusted in integer increments, e.g. from 2.5 kHz to
5.0 kHz...7.5 kHz... etc.
♦ If P339 is not set to over-modulated space vector modulation; if
P339 = 4, 5 (over-modulated space vector modulation), the
overrange limit P342 must also be reduced to limit torque ripple and
motor heating.
♦ If changeover is made between speed and torque control
(P100 = 4, 5).
♦ If changeover is made between speed and frequency control and
the following parameters are adapted:
f-control (P100 = 3) n-control (P100 = 4)
P315 = EMF Reg.Kp 2 x Kp Kp
P223 = Smooth.n/f(act)
≥ 0 ms ≥ 4 ms
P216 = Smooth. n/f(pre)
≥ 4.8 ms ≥ 0.0 ms
P222 = Src n/f(act) KK0000 KK0000 (KK0091)
The speed controller dynamic response may have to be reduced in the
case of encoder-less speed control (frequency control) (Reduce gain
(P235); increase Tn (P240)).
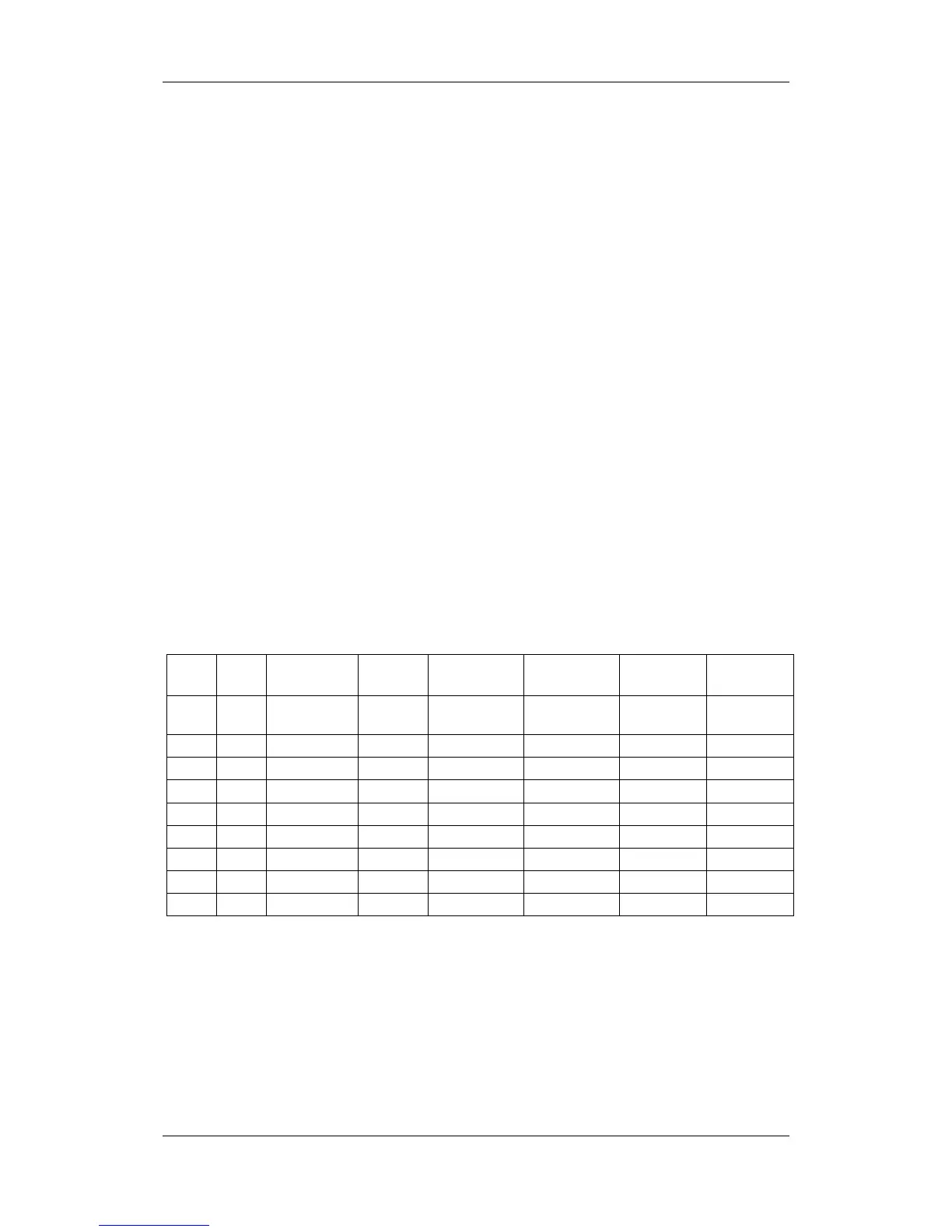
Activation of the measured value or PTC thermistor monitoring for the
motor causes different fault and alarm signals depending on the setting
of parameters P380 and P381. These are listed in the following table:
P380 /
°C
P381 /
°C
Sensor r009 Alarm A23 in
ready
Alarm A23 in
operation
Fault F20 in
ready
Fault F20 in
operation
= 0 = 0
KTY84 for RL
adapt.
if P386 =
2
- - - -
= 0 = 1 PTC no - - - yes
1)
= 1 = 0 PTC no yes
1)
yes
1)
- -
= 1 = 1 PTC no yes
1)
- - yes
1)
= 0 > 1 KTY84 yes - - - yes
3)
> 1 = 0 KTY84 yes yes
3)
yes
3)
yes
4)
yes
2)
> 1 > 1 KTY84 yes yes
3)
yes
3)
yes
4)
yes
3)
= 1 > 1 KTY84 no yes
1)
- - yes
3) 2)
> 1 = 1 KTY84 no yes
3)
yes
3)
yes
4)
yes
2)
1) Alarm or fault are triggered on violation of the PTC thermistor temperature or on a
cable break (not a cable short circuit).
2) Fault is only triggered on cable break or cable short-circuit.
3) Fault or alarm on violation of the temperature limit..
4) Fault is only triggered on cable short-circuit.
Temperature
monitoring of the
motor