Autopilot modes
The autopilot has several steering modes. The number of modes and features within the
mode depend on the autopilot computer, the boat type and available inputs.
Non-Follow Up mode (NFU)
In this mode the port and starboard buttons are used to control the rudder.
Activate this mode by selecting the port or starboard button when the autopilot is in
standby.
To change the rudder position
• Select a port or starboard button.
The rudder moves as long as the button is pressed.
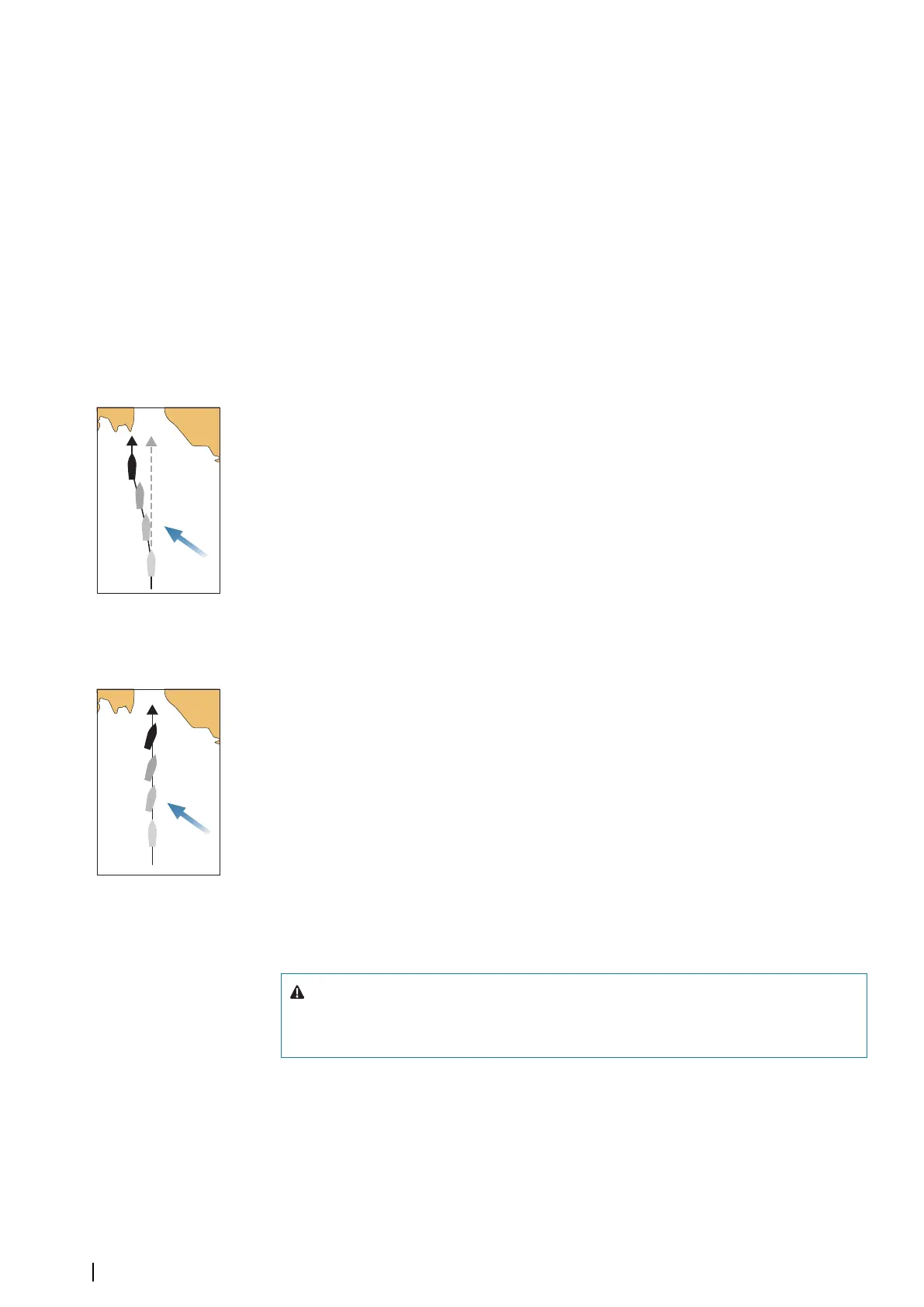
Heading hold mode (A)
In this mode the autopilot steers the vessel on the set heading.
When the mode is activated, the autopilot selects the current compass heading as the set
heading.
Ú
Note: In this mode the autopilot does not compensate for any drifting caused by current
and/or wind (W).
To change the set heading
• Select a port or starboard button
• With the autopilot controller active, turn the rotary knob
An immediate heading change takes place. The heading is maintained until a new heading is
set.
NoDrift mode
In NoDrift mode the vessel is steered along a calculated track line, from present position and
in a direction set by the user.
When the mode is activated, the autopilot will draw an invisible track line based on current
heading from the vessel’s position. The autopilot will now use the position information to
calculate the cross track distance, and automatically steer along the calculated track.
Ú
Note: If the vessel is drifting away from the track line due to current and/or wind (W), the
vessel will follow the line with a crab angle.
To change the set track line
• Select a port or starboard button
• With the autopilot controller active, turn the rotary knob
NAV mode
Warning: NAV mode should only be used in open waters. Navigation
mode must not be used while sailing, as course changes may result in
unexpected tacks or gybes.
Prior to entering NAV mode you must be navigating a route or towards a waypoint.
In NAV mode the autopilot automatically steers the vessel to a specific waypoint location, or
along a pre-defined route. Position information is used to change the course to steer to keep
the vessel on the track line to the destination waypoint.
Ú
Note: For information about navigation, refer to "Navigating" on page 46.
114
Outboard autopilot| NSS evo3S Operator Manual