The turn rate is identical to Turn rate setting.
C-turn
Steers the vessel in a circle.
Turn variable:
• Rate of turn. Increasing the value makes the vessel turn a smaller circle.
Spiral
Makes the vessel turn in a spiral with a decreasing or increasing radius.
Turn variables:
• Initial radius
• Change/turn. If this value is set to zero, the boat will turn in a circle. Negative values
indicate decreasing radius while positive values indicate increasing radius
Zigzag
Steers the vessel in a zigzag pattern.
Turn variables:
• Course change
• Leg distance
Square
Steers the vessel in a square pattern, doing 90° course changes.
Turn variable:
• Leg distance
S-turn
Makes the vessel yaw around the main heading. When activated, the autopilot is switched to
S-turns mode.
Turn variables:
• Course change
• Turn radius
The main course can be changed during the turn by turning the rotary knob.
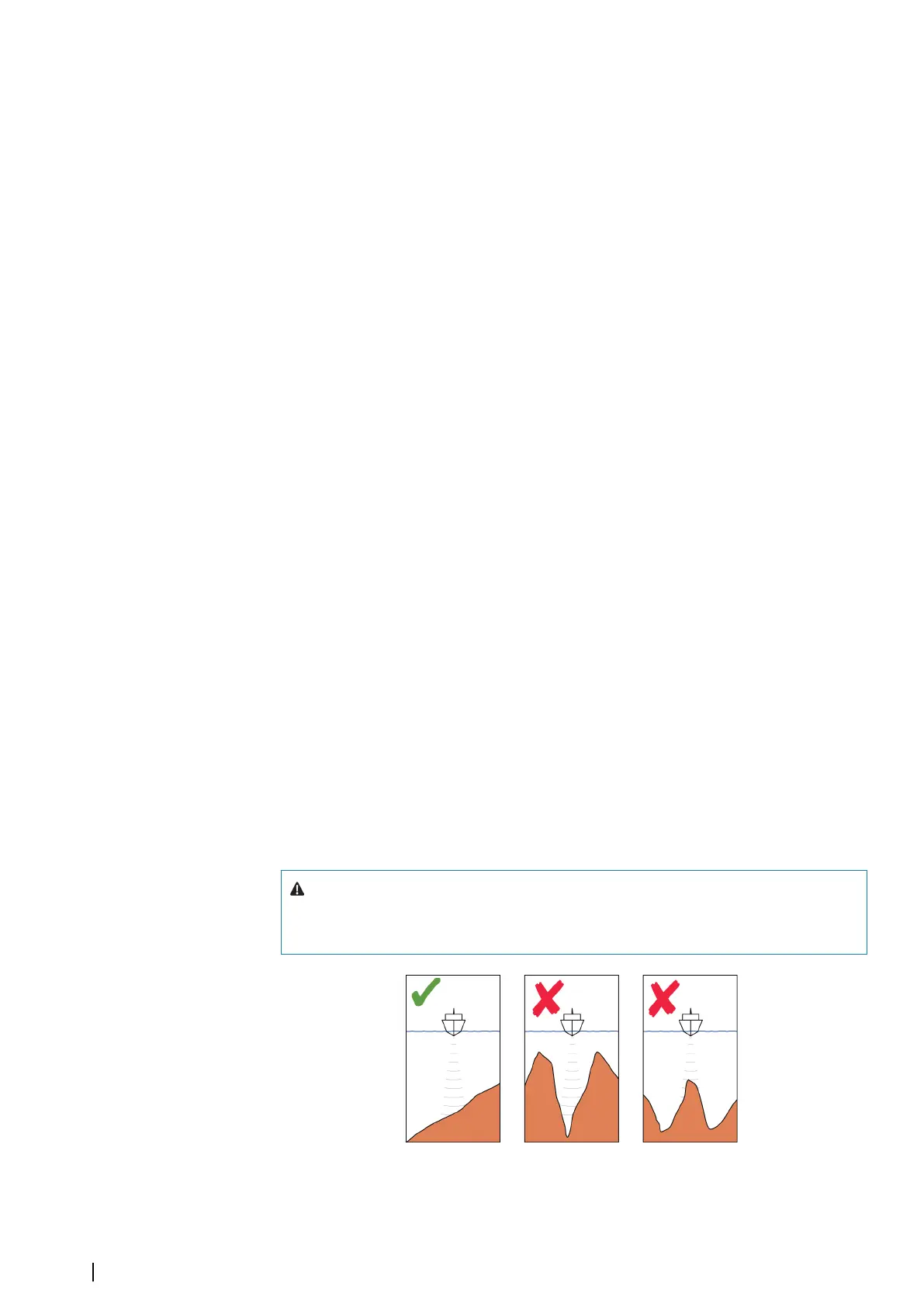
Depth contour tracking
Makes the autopilot follow a depth contour.
Ú
Note: DCT turn pattern is only available if the system has a valid depth input.
Warning: Do not use the DCT turn pattern unless the seabed is suitable.
Do not use it in rocky waters where the depth is varying significantly over a
small area.
Ú
Note: If depth data is lost during DCT the autopilot will automatically switch to auto
mode.
116
Outboard autopilot| NSS evo3S Operator Manual