Snap‐on EEWH330A Computer Wheel Balancer
Theoptimumbalancingoptimizationcondition hasbeen
achievedandcannotbeimproved.ReadingH2Silent
wheelrunningcannotbeimproved.However,itis
possibletoachieveweightminimization(readingswith
codeUN.).
Option1:Weightminimization.PresstheFINEkey(3)to
continuetheprogram.AsaresultreadingisII‐Un.7or
Un.7–II
Option2:Abortoptimization.PresstheSTOPkey(5)to
exittheOPprogramandreturntothebalancingprogram.
Theimbalanceonthewheelisshownonthereadout.
Balancethewheelaccordingtothereadings.Weight
minimizationprogramcycle.Iftherimcompensationrun
wasomittedandtheFINEkey(3)waspressedtogo
directlyintotheminimizationprogram(readingUn.),
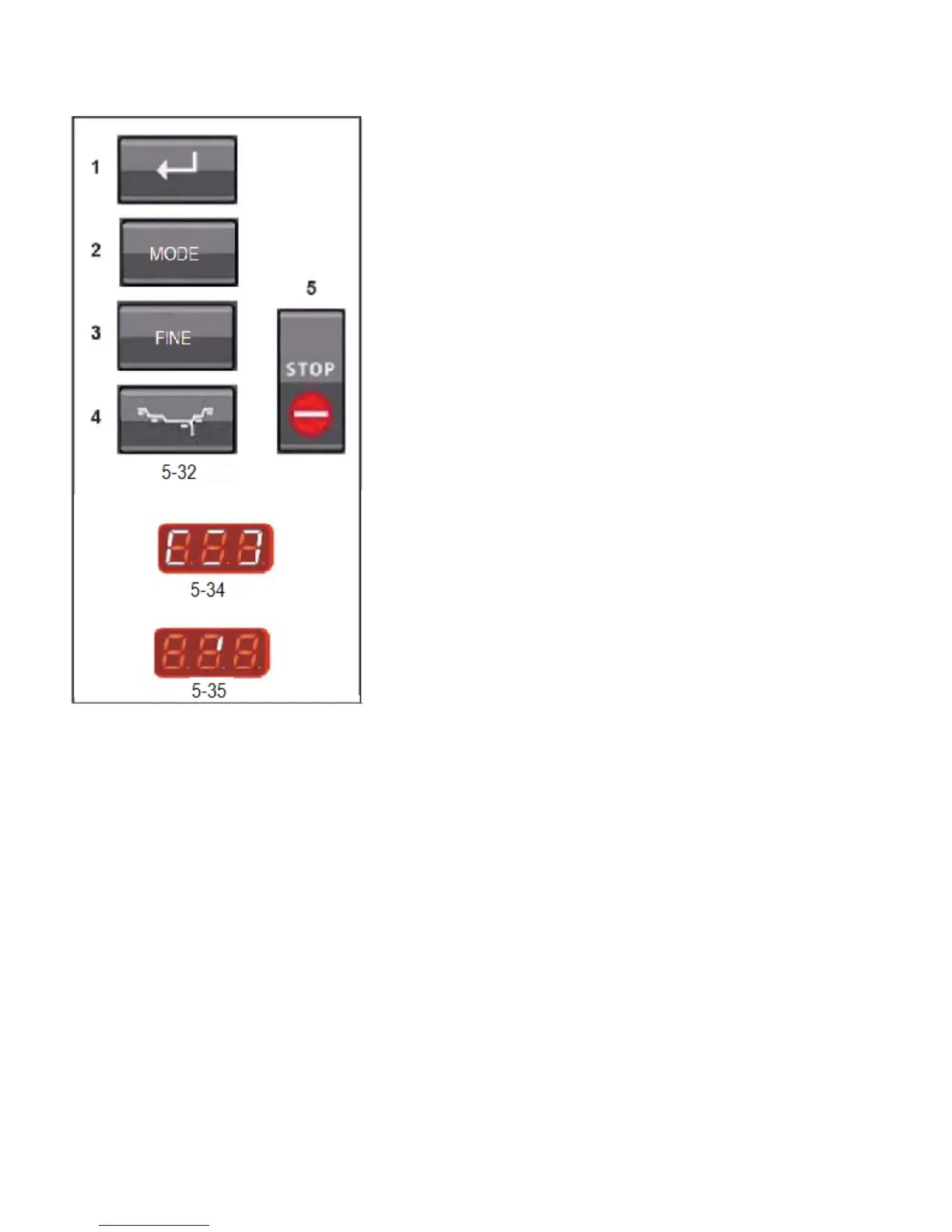
proceedasfollows.Clampthewheel.Positionthevalve
exactlyperpendiculartoandabovethemainshaft.Press
theENTERkey(1)toacquirethevalveposition.Reading
Un.4appears(Fig.5‐34).Spinthewheel(START).The
measuringruniscarriedout.Afterthemeasuringruntwo
readingsarepossible:Un.5H1.Furtherminimizationis
notrecommended,butispossible.
Un.5–I(1ReferencemarkFig.5‐35).ContinuewiththeUN
program.ReadingUn.5‐H1IfUn.5‐H1appears,further
minimizationisnotrecommendedsincethe
measurementvaluesdonotexceedthelimitvalues.
However,itispossibletocontinueminimizationsoasto
achieveanimprovement,ifonlyslight(e.g.:forcritical
vehicles).
Tocontinueminimization:Proceedasindicatedfor
readingUn.5–I.Toabortminimization:PresstheSTOP
key(5)toreturntothebalancingprogramandbalance
thewheelaccordingtothereadings.ReadingUn.5–I(1
ReferencemarkFig.5‐35).Afterthemeasuringrunread
ustthewheelaccordingtothedirectionindicatorand
makeachalkmark(Fig.5‐36)ontherightsideofthetire
exactlyperpendiculartoandabovethemainshaft.
Readjustthetireontherimsothatthemarkcoincides
withthevalve(usethetirechangerFig.5‐37).