Watlow Series F4P Features ■ 7.7
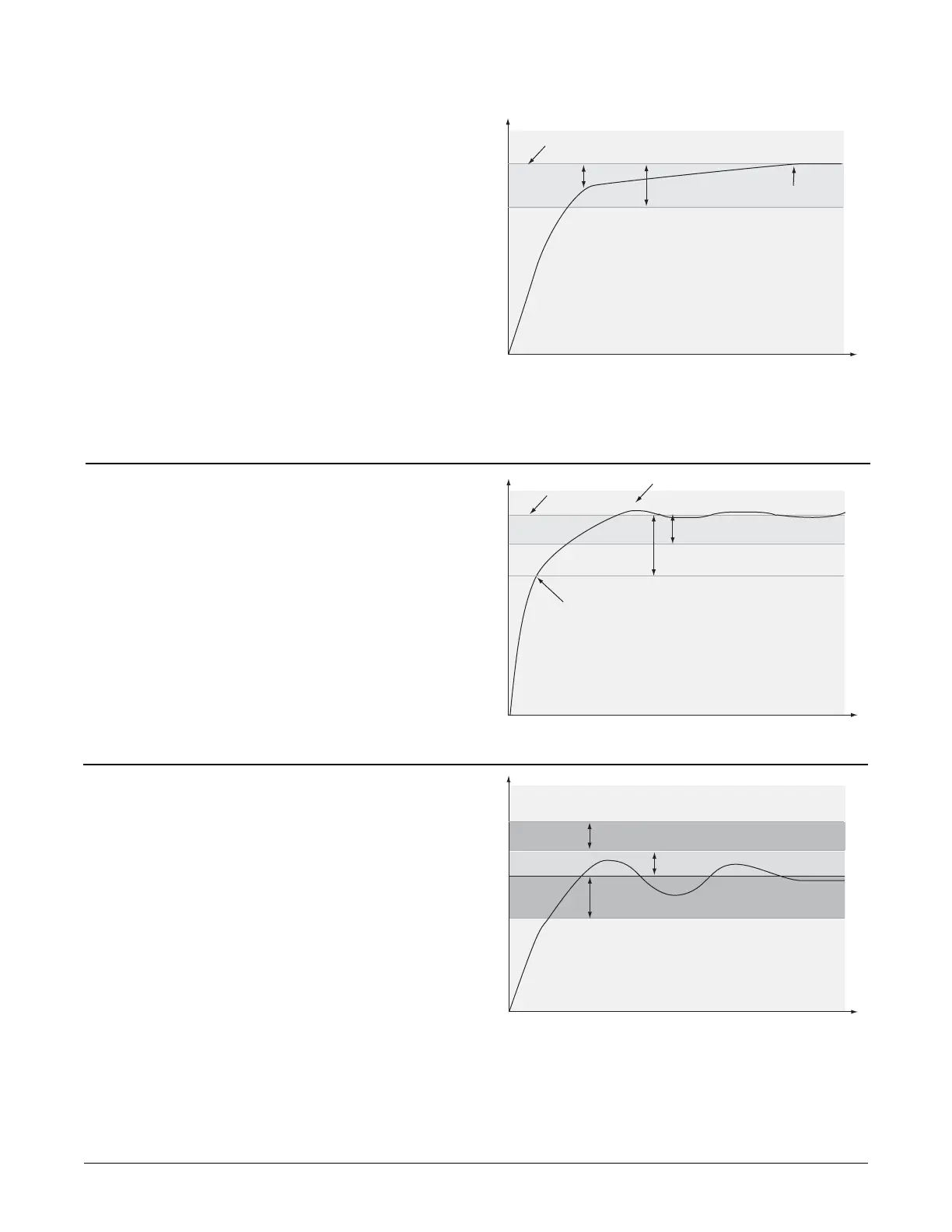
Proportional Integral Derivative (PID)
Control
Use derivative control to minimize overshoot in a PI-con-
trolled system. Derivative adjusts the output based on
the rate of change in the temperature or process value.
Too much derivative will make the system sluggish.
Location in software: Operations Page > Edit PID > PID
Set x (1 to 5).
Figure 7.7b — PID Control.
Time
Temperature
Set Point
Reduced Overshoot
Proportional Band
Proportional Band x 2
Heating slows
Dead Band
In a PID application the dead bands above and below the
set point can save an application's energy and wear by
maintaining process temperature within acceptable
ranges. Shifting the effective cooling set point and heat-
ing set point keeps the two systems from fighting each
other.
Proportional action ceases when the process value is
within the dead band. Integral action continues to bring
the process temperature to the set point. When the dead
band value is zero, the heating element activates when
the temperature drops below the set point, and the cool-
ing element switches on when the temperature exceeds
the set point.
Location in software: Operations Page > Edit PID > PID
Set x (1 to 5).
Figure 7.7c — Cooling Dead Band.
Time
Temperature
Heating Set Point
Heating Proportional Band
Cooling Dead Band
Cooling Set Point
Cooling Proportional Band
Proportional plus Integral (PI) Control
The droop caused by proportional control can be correct-
ed by adding integral control. When the system settles
down the integral value is tuned to bring the tempera-
ture or process value closer to the set point. Integral de-
termines the speed of the correction, but this may in-
crease the overshoot at startup or when the set point is
changed. Too much integral action will make the system
unstable. Integral is cleared when the process value is
outside of the proportional band.
Integral (if units are set to SI) is measured in minutes
per repeat. A low integral value causes a fast integrating
action.
Reset (if units are set to U.S.) is measured in repeats per
minute. A high reset value causes a fast integrating ac-
tion.
Location in software: Operations Page > Edit PID > PID
Set x (1 to 5).
Figure 7.7a — Proportional Plus Integral Control.
Time
Temperature
Set Point
Proportional Band
Droop corrected
Droop

 Loading...
Loading...






