9.3 Parameter File Requirements for SERVOPACKs for Rotary Motors
If a third-party motor is to be operated, a configuration file has to be created by
YASKAWA. To create this file, provide YASKAWA with the following information: motor
data sheet containing all information shown in table below, encoder data sheet containing
all information shown in Parameter File Requirements for Encoders and a sample motor/
encoder combination for checking the overload characteristics. Send this information to
YASKAWA Europe Headquarters, whose address can be found on the last cover page.
Customer: ____________________
Date: ____________________
Motor type: ____________________
Motor supplier: ____________________
Motor serial number: ____________________
Encoder type: ____________________
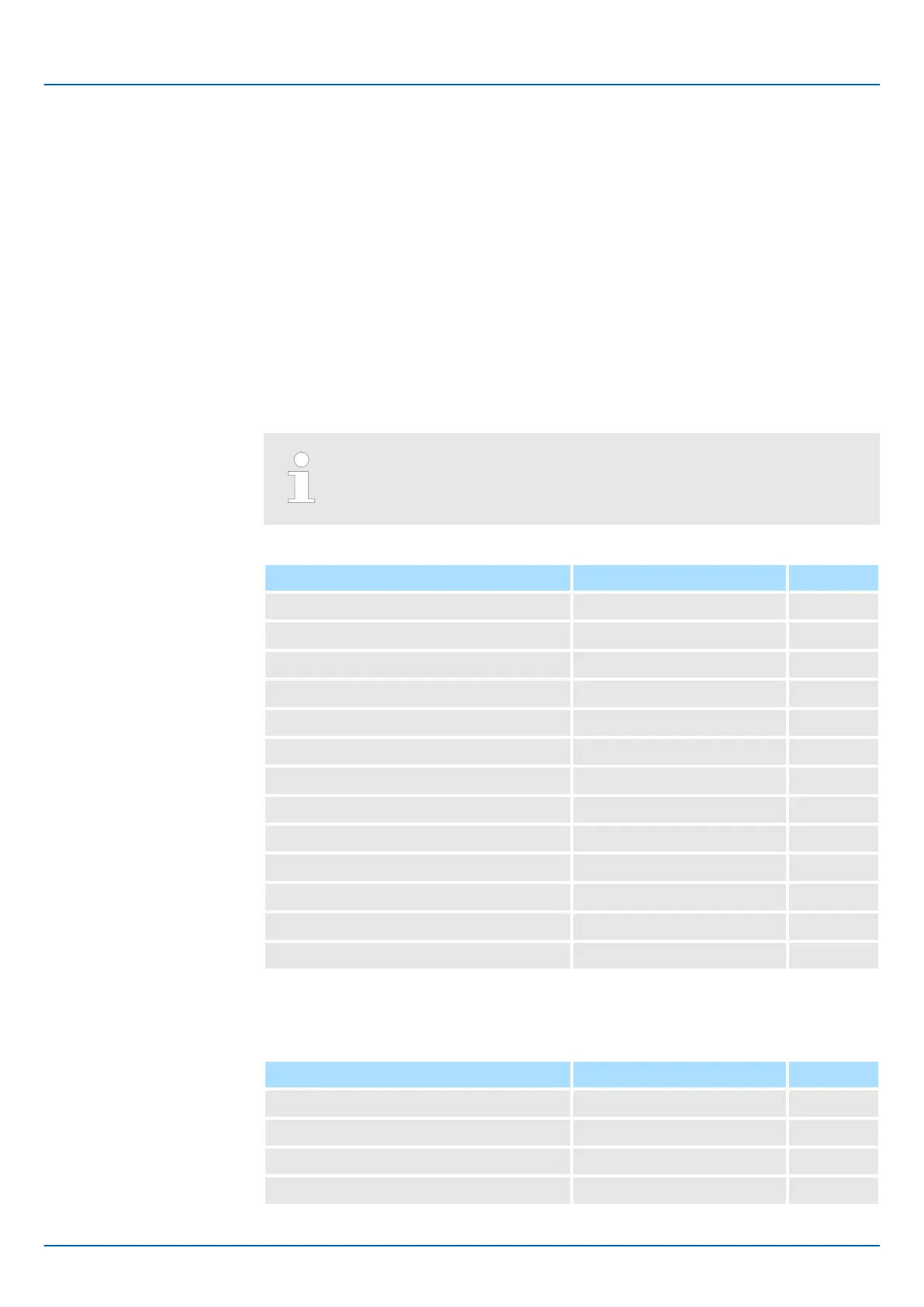
Please include complete original manufacturer’s motor and encoder data
sheets.
Motor Data Value Units
Motor Voltage V
Rated Power W
Motor Pole Number -
Rated Torque Nm
Maximum Torque Nm
Rated Current Arms
Maximum Current Arms
Electromotive Force (BEMF Constant) (*1) mVrms/rpm
Rated Speed rpm
Maximum Speed rpm
Moment of Inertia
10
-4
kg m
2
Winding Resistance (*1) Ohm
Winding Inductance (*1) mH
*1: please indicate “line to line” or “line to neutral”.
The following table is to be filled by Yaskawa.
Motor Data Value Units
Over Speed Detection Level %
Base Torque for Overload Detection %
Overload Detection Torque 1 %
Overload Detection Time 1 s
Sigma-5 and Sigma-7 Series SERVOPACKs
Motor and Encoder / Scale Configuration
Parameter File Requirements for SERVOPACKs for Rotary Motors
| | Feedback Option Module Type 3 - Manual version C - Revision 0 | en | 49

 Loading...
Loading...






