11 SERVOPACK Set-up
11.1 SERVOPACK for Fully-closed Loop Control
Depending on the application, these parameters should be set for correct operation of the
SERVOPACK with the option module.
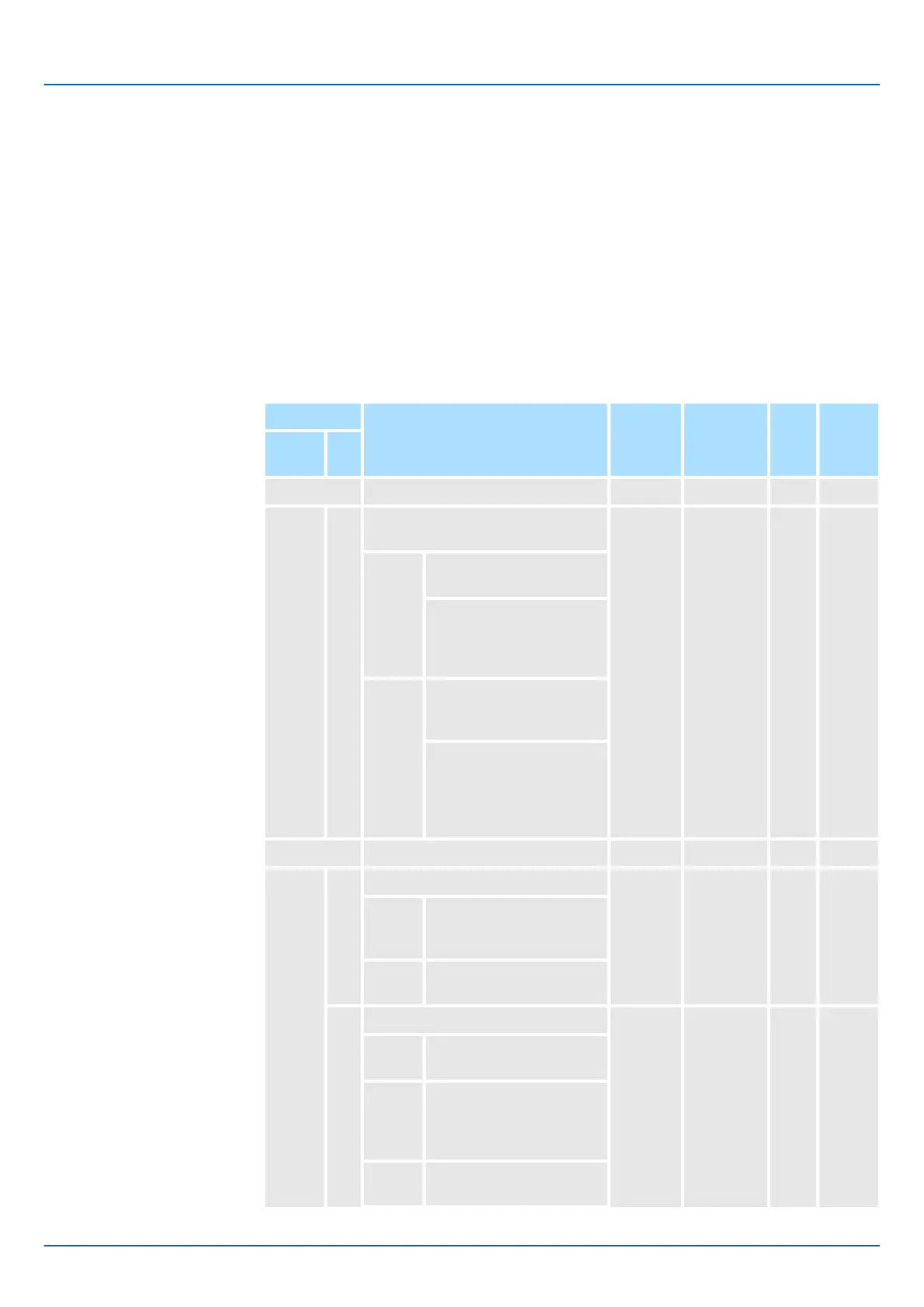
11.1.1 Motor Rotation / Movement Direction
The relationship between motor feedback direction and external feedback direction is
dependent on the mounted conditions. So, the parameters below are used for the coordi-
nation.
Parameter Function Default
Value
Required
value
Cat. When
ena-
bled
No. Dig
.
Pn000 Basic Function Selections 0 - - - -
0 Rotation / Movement Direction
Selection
0 *1 O After
restart
0 Use CCW as the forward
direction.
Use the direction in
which the linear encoder
counts up as the forward
direction.
1 Use CW as the forward
direction. (Reverse Rota-
tion Mode)
Use the direction in
which the linear encoder
counts down as the for-
ward direction. (Reverse
Movement Mode)
Pn002 Application Function Selections 2 - - - -
2 Encoder Usage 0 *1 O After
restart
0 Use the encoder
according to encoder
specifications.
1 Use the encoder as an
incremental encoder.
3 External Encoder Usage 0 1 or 3 M After
restart
0 Do not use an external
encoder.
1 The external encoder
moves in the forward
direction for CCW motor
rotation.
2 Reserved setting (Do not
use.)
Sigma-5 and Sigma-7 Series SERVOPACKs
SERVOPACK Set-up
SERVOPACK for Fully-closed Loop Control > Motor Rotation / Movement Direction
| | Feedback Option Module Type 3 - Manual version C - Revision 0 | en | 73

 Loading...
Loading...






