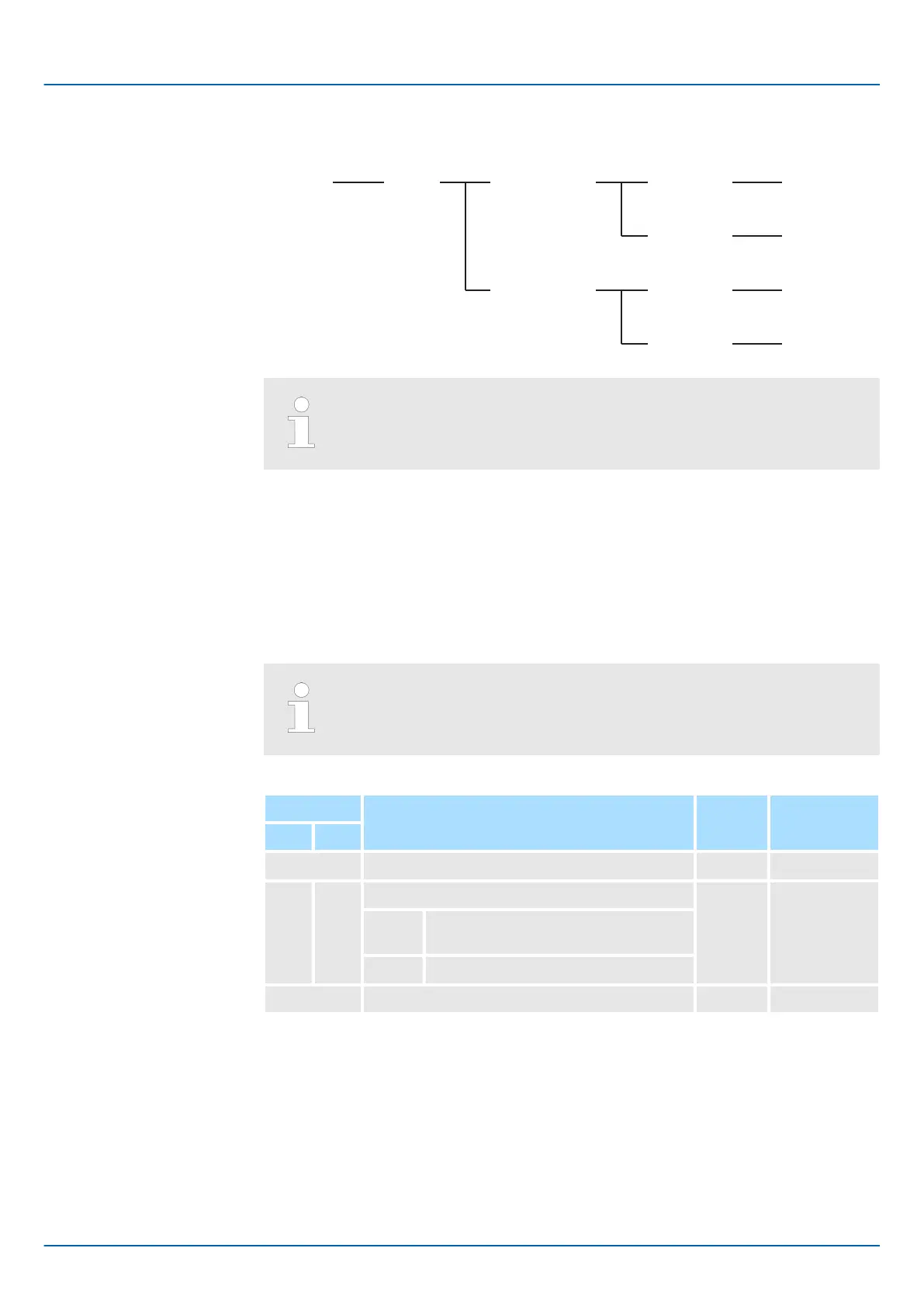
CCW
(CW)
Pn000.0 = 0
Pn080.1 = 0
Pn000.0 = 1
Pn080.1 = 1
Pn000.0 = 0
Pn080.1 = 1
Pn000.0 = 1
Pn080.1 = 0
CW
(CCW)
CCW
(CW)
Un00D increase
(Un00D decrease)
Not available
(Pn080.0 = 1)
Forward
(Reverse)
Un00D decrease
(Un00D increase)
CW
(CCW)
Hall Sensor
Command
Desired Direction
Monitor Feedback
Pulse Counter
Visual Check
Rotation of Shaft Parameter Setting
Please make sure Pn080.1 is set according the above diagram. Other-
wise motor malfunction may occur.
12.3 SERVOPACK for Rotary Motors
12.3.1 Encoder Pulse Output
These parameters are used for position counting by upper controller. The SERVOPACK
outputs the pulse according to the settings. If the application does not use this encoder
pulse output (e.g. network application), the functionality can be disabled by the parameter
Pn081.1 = 1
This specification is applied to the usage with the encoder feedback. In
case that the pulse resolution is not 2
n
, C-pulse (origin pulse) does not
synchronize to A-pulse. C-pulse synchronizes to the edge of A/B-pulse.
Parameter Function Default
Value
When ena-
bled
No. Dig.
Pn081 Application Function Selections 81 - -
1 Encoder Pulse Output Usage 0 After restart
0 Enables the pulse output function
(Pn212)
1 Disables the pulse output function
Pn212 Number of Encoder Output Pulses 2048 After restart
Sigma-5 and Sigma-7 Series SERVOPACKs
SERVOPACK with Semi-closed Loop Control for Rotary Motors
SERVOPACK for Rotary Motors > Encoder Pulse Output
| | Feedback Option Module Type 3 - Manual version C - Revision 0 | en | 91

 Loading...
Loading...






