12 SERVOPACK with Semi-closed Loop Control for Rotary Motors
This chapter describes the rotary drives common in semi-closed loop.
12.1 Magnetic Pole
For driving third party motors, the magnetic pole should be coordinated. The parameters
in the following table are used for that.
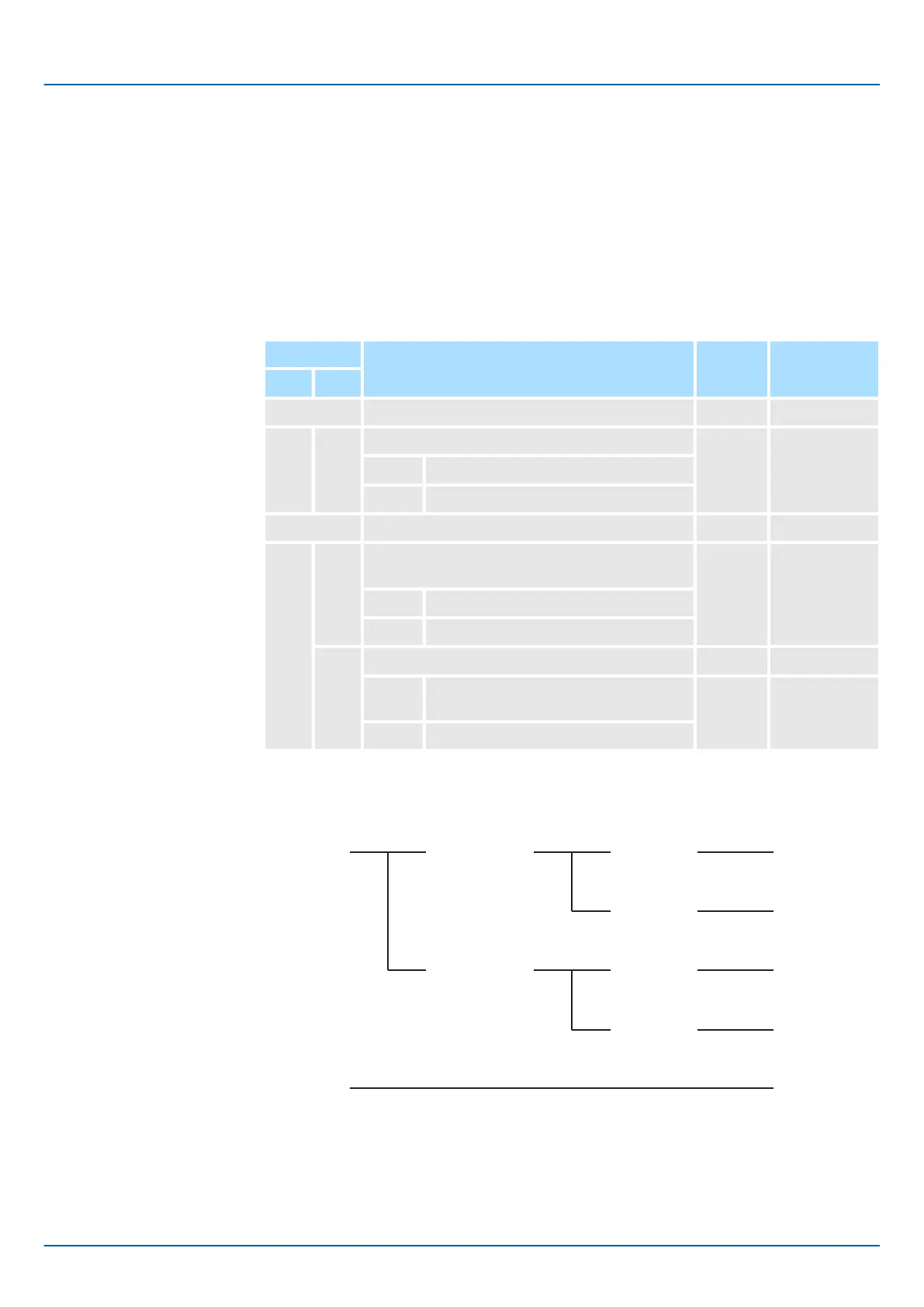
Parameter Function Default
Value
When ena-
bled
No. Dig.
Pn080 Application Function Selections 80 - -
0 Polarity Sensor Selection 0 After restart
0 Use polarity sensor.
1 Do not use polarity sensor.
Pn081 Application Function Selections 81 - -
2 Coordination Setting between Origin and U-
phase position
0 After restart
0 Both positions are same
1 The positions are different
3 Hall Sensor Signal Inversion
0 Does not inverse the signals (Pos-
Logic)
0 After restart
1 Inverses the signals (Neg-Logic)
Parameter Setting
Positive logic Pn080.0 = 0
Pn081.2 = 0
Pn081.3 = 0
Pn080.0 = 0
Pn081.2 = 0
Pn081.3 = 1
Pn080.0 = 0
Pn081.2 = 1
Pn081.3 = 0
Pn080.0 = 0
Pn081.2 = 1
Pn081.3 = 1
Pn080.0 = 1
Pn081.2 = 0
Pn081.3 = 0
Negative logic
Positive logic
Same positionAvailable
Not available
Different Position
Negative logic
Hall Sensor Origin and U-phase Hall Sensor Signal Parameter Setting
Sigma-5 and Sigma-7 Series SERVOPACKs
SERVOPACK with Semi-closed Loop Control for Rotary Motors
Magnetic Pole
| | Feedback Option Module Type 3 - Manual version C - Revision 0 | en | 89

 Loading...
Loading...






