NoteAction
Art. no. is specified in Required equipment on page 202.Fit the lifting accessory and ad-
just it as detailed in the enclosed
instructions.
4
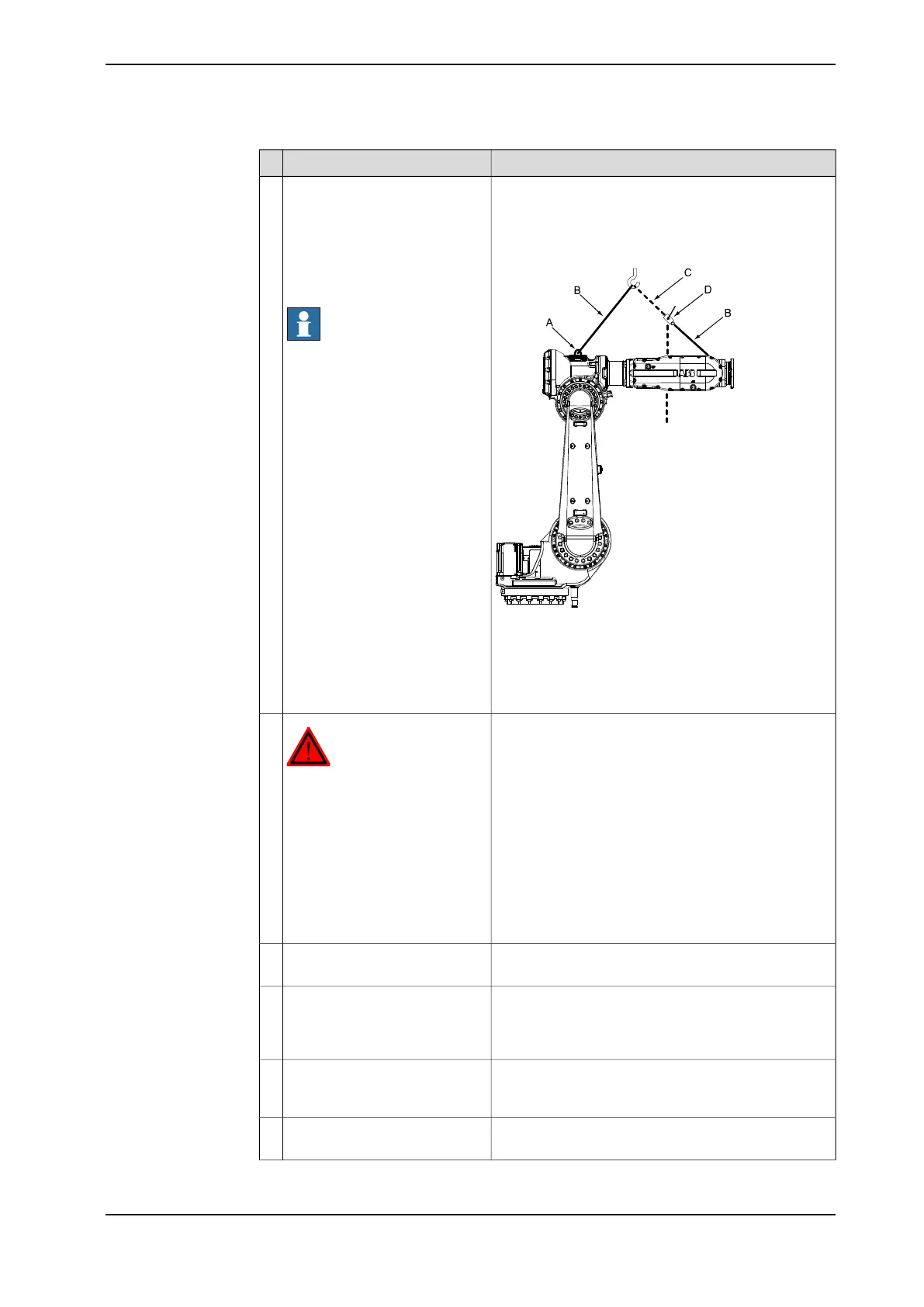
Make sure the lift is done completely level! How to
adjust the lift is described in the enclosed instruction
to the lifting accessory! Read the instructions before
lifting!
xx0600003101
• A : Lifting tool
• B : Roundsling
• C : Lifting chain
• D : Hoisting block
Also fit a hoisting block to the
front, used to adjust the balance
of the arm system in order to lift
it completely level.
Note
There is an alternate method of
lifting the complete armsystem
described below.
DANGER
Turn off all:
• electric power supply to
the robot
• hydraulic pressure supply
to the robot
• air pressure supply to the
robot
Before entering the robot work-
ing area.
5
Detailed in section Changing oil, axis-1 gearbox on
page 151.
Drain the oil from gearbox axis
1.
6
Disconnect the cabling in the
rear of the robot base and re-
move the cable support plate in-
side the base.
7
How to replace the cabling is detailed in Replacement
of cable harness, lower end (axes 1-2) on page 185.
Pull the disconnected cabling up
through the center of the axis-1
gearbox.
8
Detailed in section Replacement of motor, axis 1 on
page 242.
Remove the motor, axis 1.9
Continues on next page
Product manual - IRB 6620 205
3HAC027151-001 Revision: T
© Copyright 2006-2018 ABB. All rights reserved.
4 Repair
4.3.3 Replacement of complete arm system
Continued
 Loading...
Loading...









