NoteAction
xx0200000199
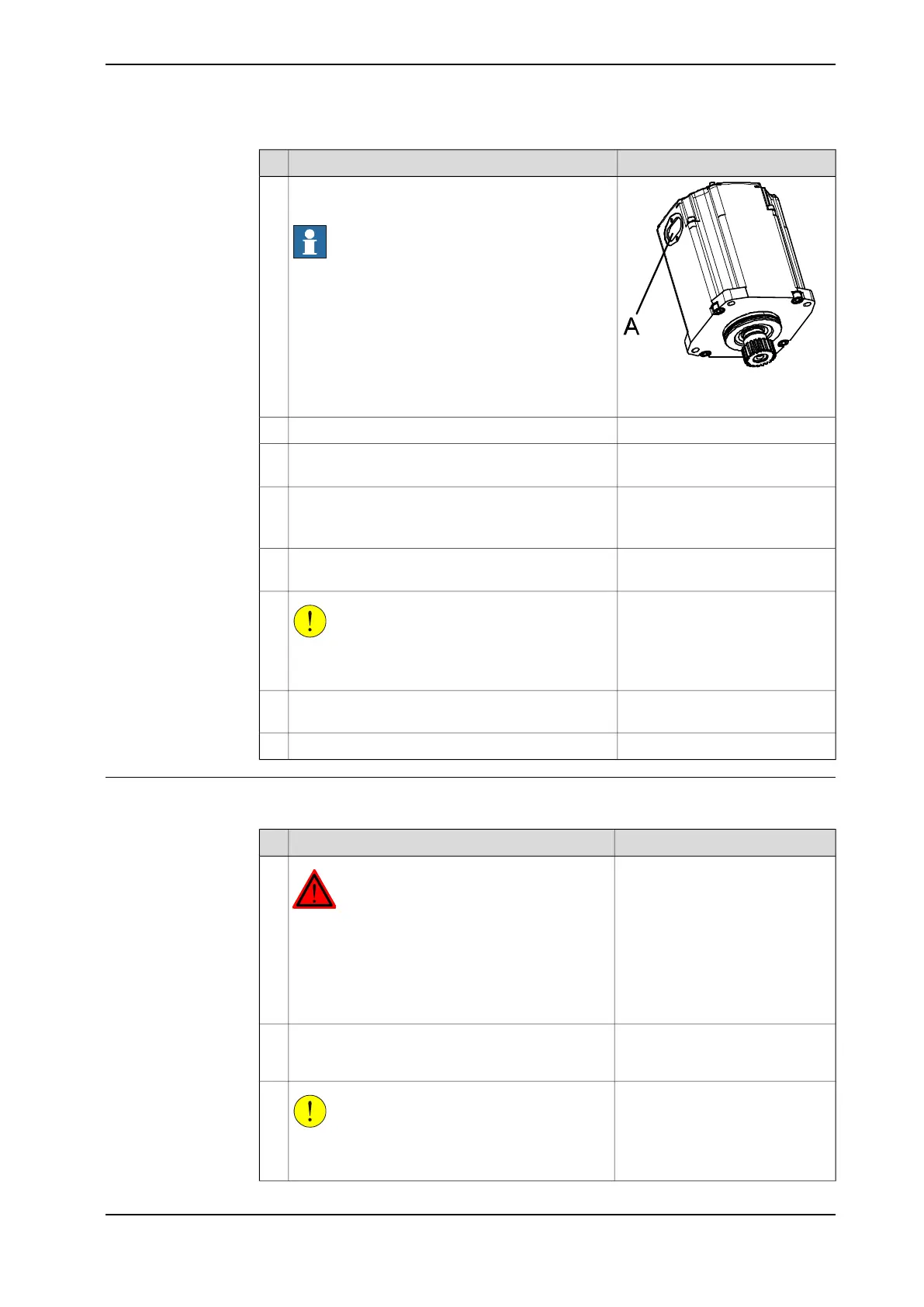
Remove the cable gland cover at the cable exit by
unscrewing its two attachment screws.
Note
Make sure the gasket is not damaged!
4
• A: Cable gland cover
Disconnect all connectors beneath the motor cover.5
Art. no. is specified in Required
equipment on page 243.
Apply lifting tool, motor axis 1, 4, 5 to the motor.6
Connect to connector R2.MP1
• +: pin 2
• -: pin 5
In order to release the brakes, connect the 24 VDC
power supply.
7
Shown in the figure Location of
motor on page 242.
Remove the motor by unscrewing its four attach-
ment screws and plain washers.
8
CAUTION
The motor weighs 25 kg! All lifting equipment used
must be sized accordingly!
9
Lift the motor to get the pinion away from the gear
and disconnect the brake release voltage.
10
Remove the motor by gently lifting it straight up.11
Refitting, motor axis 1
The procedure below details how to refit motor, axis 1.
NoteAction
DANGER
Turn off all:
• electric power supply to the robot
• hydraulic pressure supply to the robot
• air pressure supply to the robot
Before entering the robot working area.
1
Art no. is specified in Required
equipment on page 243.
Make sure the o-ring on the circumference of the
motor is seated properly. Lightly lubricate the o-
ring with grease.
2
CAUTION
The motor weighs 25 kg! All lifting equipment used
must be sized accordingly!
3
Continues on next page
Product manual - IRB 6620 245
3HAC027151-001 Revision: T
© Copyright 2006-2018 ABB. All rights reserved.
4 Repair
4.6.1 Replacement of motor, axis 1
Continued
 Loading...
Loading...









