Removal, upper arm
The procedure below details how to remove the upper arm.
NoteAction
Decide which calibration routine to use, and
take actions accordingly prior to beginning
the repair procedure.
1
Remove all equipment fitted to the turning
disk.
2
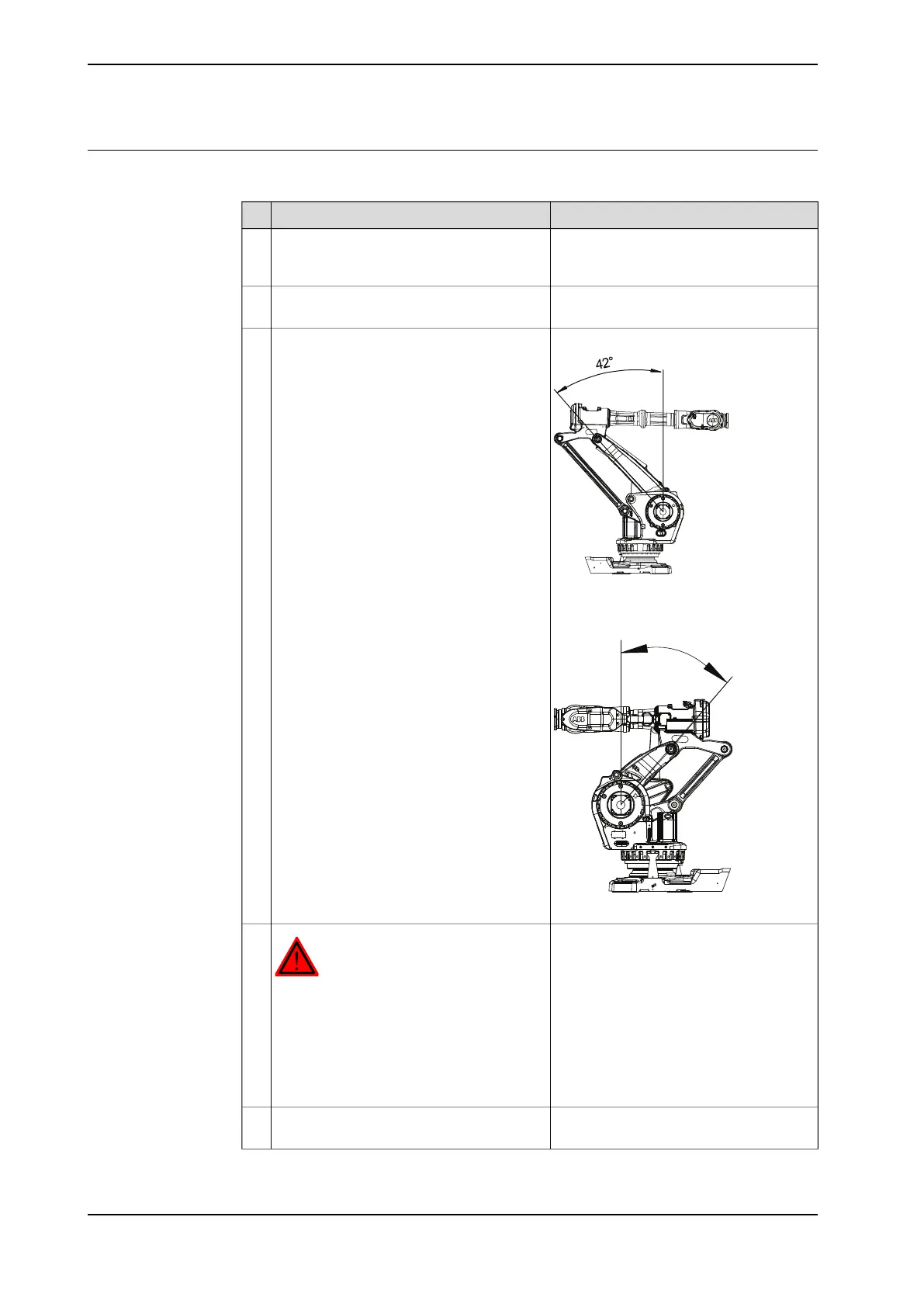
IRB 6660 - 130/3.1, IRB 6660 - 100/3.3
xx0700000137
Move the upper arm to a horizontal position.
Rotate axis 4 so that the attachment hole
for lifting eye is facing upwards.
3
IRB 6660 - 205/1.9
xx0700000518
DANGER
Turn off all:
• electric power supply
• hydraulic pressure supply
• air pressure supply
to the robot, before entering the robot
working area.
4
Secure the upper arm with lifting slings in
an overhead crane.
5
Continues on next page
232 Product manual - IRB 6660
3HAC028197-001 Revision: S
© Copyright 2007-2018 ABB. All rights reserved.
4 Repair
4.4.3 Replacement of upper arm
Continued
 Loading...
Loading...








