NoteAction
DANGER
Turn off all:
• electric power supply
• hydraulic pressure supply
• air pressure supply
to the robot, before entering the robot working
area.
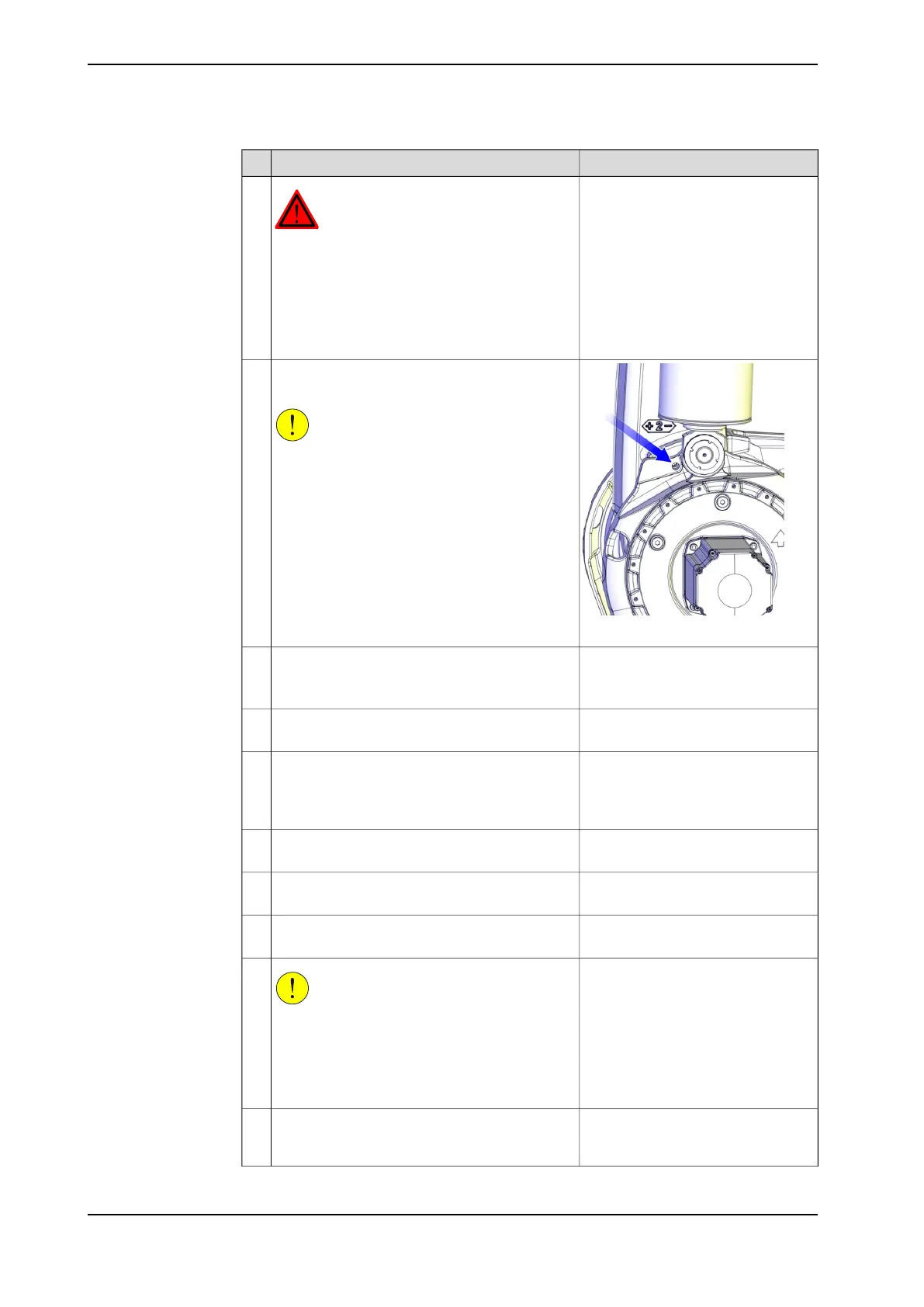
2
xx1000001101
Secure the lower arm with a lock screw in the
hole as shown in the figure to the right.
CAUTION
Tighten by hand!
3
See Replacing the balancing device
on page 266
(Not applicable to robot variant IRB 6660 -
205/1.9 ! )
Remove the balancing device.
4
See Replacing the parallel rod on
page 238.
Remove the parallel rod.5
See .Remove the cable harness in the upper and
lower arm.
6
Secure the cable harness in a way that it is pro-
tected from oil spill and damage.
See Replacement of upper arm on
page 227.
Remove the complete upper arm.7
See Replacing motors, axes 2 and 3
on page 281.
Remove the axes 2 and 3 motors.8
See Replacing the gearbox, axes 2-
3 on page 324.
Remove the axes 2 and 3 gearboxes.9
CAUTION
The robot lower arm weighs 160 kg (IRB 6660 -
100/3.3, IRB 6660 - 130/3.1) / 110 kg (IRB 6660
- 205/1.9).
All lifting accessories used must be sized accord-
ingly!
10
Specified in Required equipment on
page 244.
Secure the complete lower arm system (includ-
ing the parallel arm) with a lifting tool, lower arm
complete in an overhead crane or similar.
11
Continues on next page
246 Product manual - IRB 6660
3HAC028197-001 Revision: S
© Copyright 2007-2018 ABB. All rights reserved.
4 Repair
4.4.5 Replacing the complete lower arm
Continued