27
Navigating and Customizing Your Flow Controller
Adjusting the PID controller
Your mass ow controller uses an electronic PID controller to determine how
to actuate its valve(s) in order to achieve the commanded setpoint. We have
tuned these settings for your specic operating conditions, but changes to
your process sometimes require on-site adjustments to maintain optimal
control performance. If you encounter issues with control stability, oscillation
or speed of response, ne-tuning your PID control loop may help.
The Loop Setup menu (MENU > CONTROL > ADV CONTROL > LOOP SETUP) lets you
choose the PID control loop algorithm and adjust the gain settings for the
proportional, integral and derivative variables.
Tuning the PD/PDF control algorithm
Alicat's default control algorithm (PD) employs pseudo-derivative feedback
(PDF) control, which uses just two variables:
• The larger the D gain, the slower the controller will correct errors between
the commanded setpoint and the measured process value. This is equivalent
to the P variable in common PDF controllers.
• The larger the P gain, the faster the controller will correct for osets based
on the size of the errors and the amount of time they have occurred. This is
equivalent to the I variable in common PDF controllers.
Note: The D and P variables in Alicat's PD/PDF control algorithm are
more typically referred to as P and I, respectively, in PDF controllers.
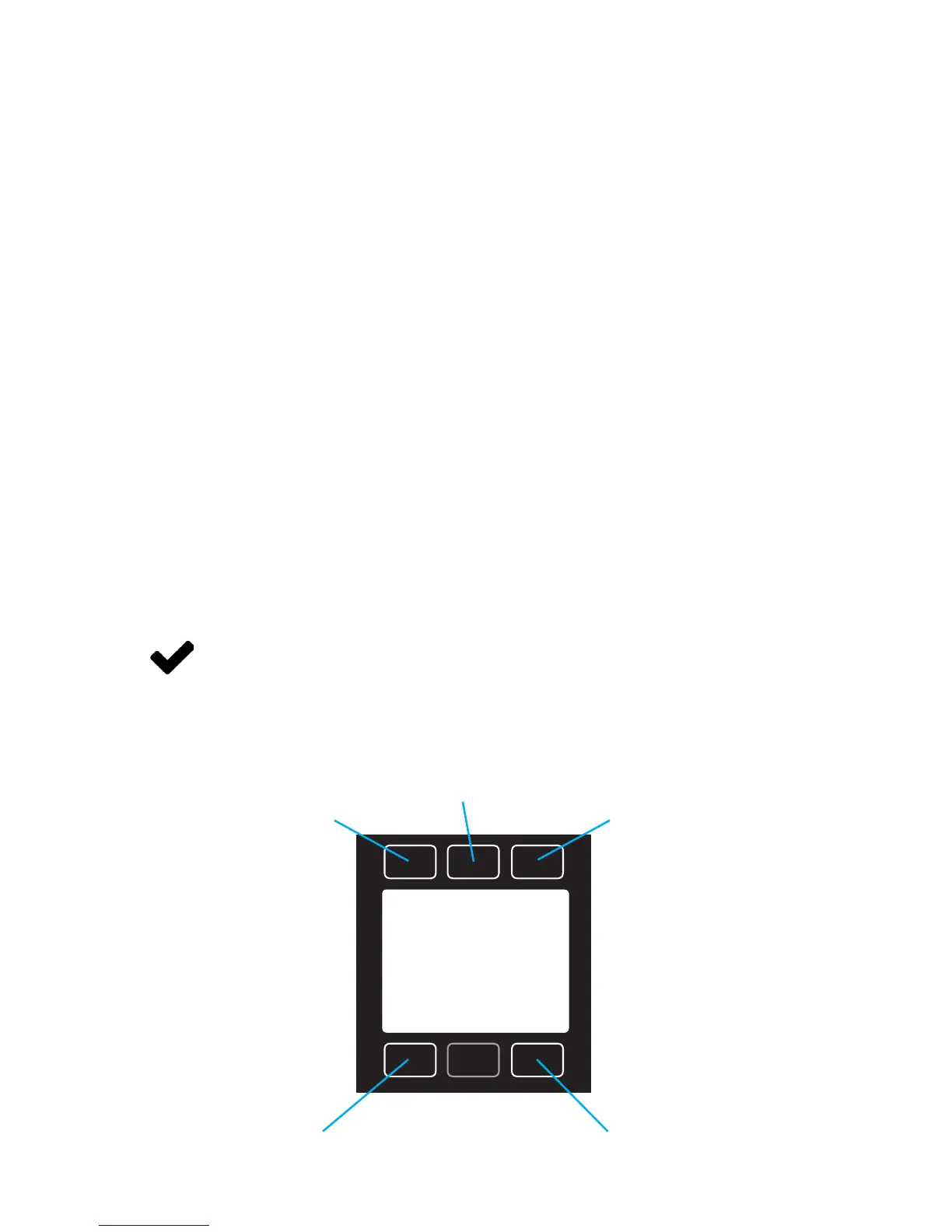
Advanced Control | Loop Setup
MAIN
BACK
LOOP
GAINS
LOOP
TYPE
LOOP
VAR
MAIN Exits to the Main Display
(page 19).
BACK Returns to the Control
Options Menu.
LOOP GAINS Adjusts the gain
settings for the proportional,
integral and derivative (PID)
control functions.
LOOP VAR Sets the controller's
closed loop to control for
ow (mass or volumetric) or
pressure (absolute or gauge,
if a barometer is present).
LOOP TYPE Sets the control algorithm
for PD/PDF or PD
2
I.

 Loading...
Loading...