Motion Event Instructions
Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018 251
For the operands that require you to select from available options, enter your
selection as:
This Operand Has These Options Which You
Enter as Text Or Enter as a Number
TriggerCondition positive_edge
negative_edge
0
1
WindowedRegistration disabled
enabled
0
1
MOTION_INSTRUCTION Structure
Mnemonic Description
.EN (Enable) Bit 31 It is set to true when the rung makes a false-to-true transition and remains set until the servo message transaction is completed
and the rung goes false.
.DN (Done) Bit 29 It is set to true when the axis registration event checking has been successfully armed.
.ER (Error) Bit 28 It is set to to true to indicate that the instruction detected an error, such as if you specified an unconfigured axis.
.IP (In Process) Bit 26 It is set to true on positive rung transition and cleared to false after the registration event has occurred, or has been superseded by
another Motion Arm Reg command, or terminated by a Motion Disarm Reg command.
.PC (Process Complete) Bit 27 It is set to true when a registration event occurs.
Description
The MAR instruction sets up a registration event to store the actual positions of
the specified physical axis on the specified edge of the selected dedicated high
speed Registration input for that axis.
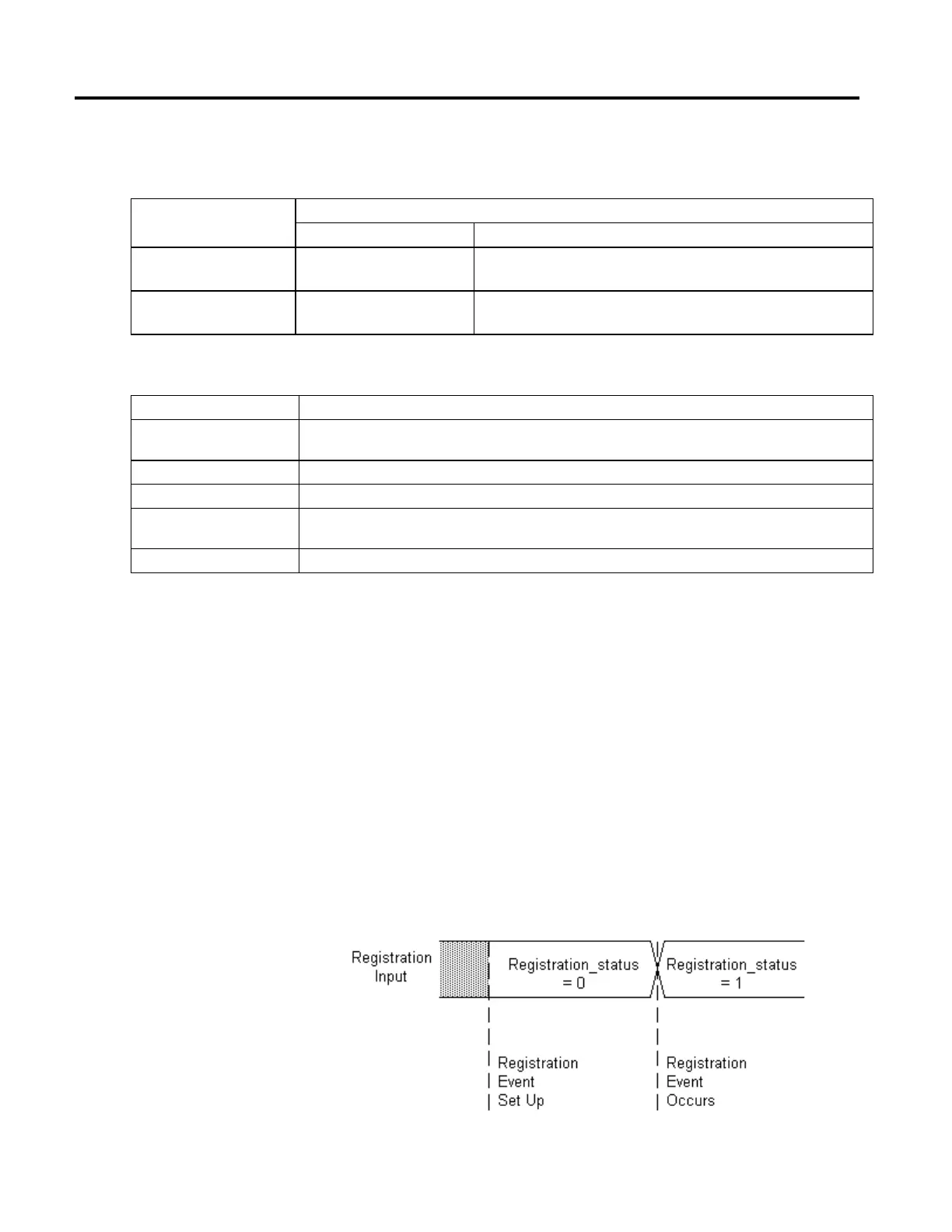
When an MAR instruction is executed, the RegEventStatus bit is set to 0
(FALSE) and the selected Registration input for the specified axis is monitored
until a Registration input transition of the selected type (the registration event)
occurs. When the registration event occurs, the RegEventStatus bit for the axis is
set to 1 (TRUE) and the Actual Position of the axis is stored in the Registration
Position variable corresponding to the registration input (for example,
Registration 1 Position 1 or Registration 2 Position).
Registration
 Loading...
Loading...


