538 Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018
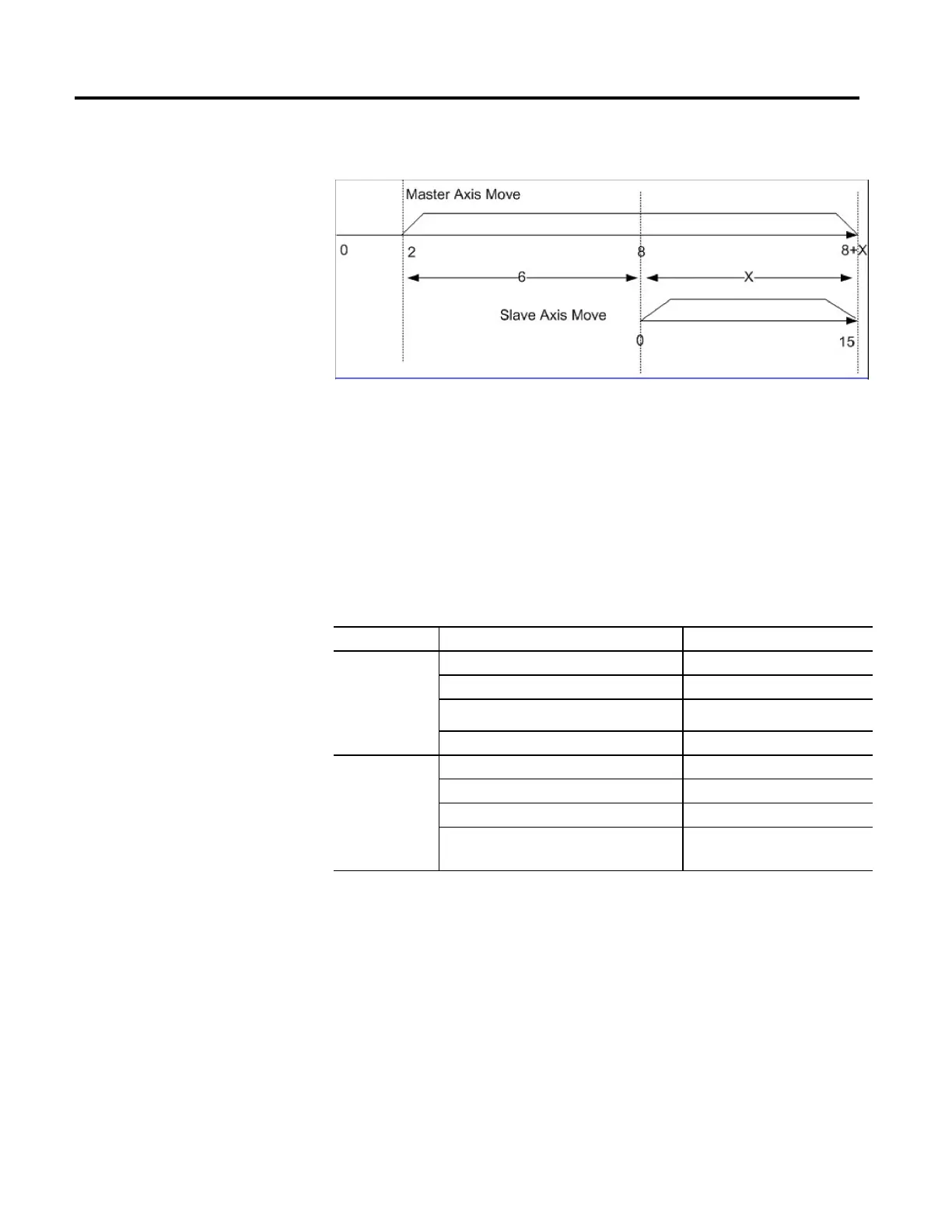
Master Distance X
Common enumerations are used for the speed parameter of all motion
instructions. Some instructions accept only a limited subset of the speed
enumerations. Checks for valid unit combinations are done at instruction
execution time. Some enumerations that are in the following table are not used
now but are reserved for future enhancements.
Additional tables are given below that further clarify which combinations are
accepted in MDSC mode and which are accepted in Time Driven mode.
Speed Unit Parameter Descriptions
Mode Enumerations Compatibility
Time Driven 0 = Units per sec2 Existing Enumeration
1 =% Maximum Existing Enumeration
2 = Reser ved
3 = Seconds Time based programming New Enumeration
MDSC 4 = Units per MasterUnit New Enumeration
5 = Reser ved
6 = Reser ved
7 = Master Units
Analogous to seconds in time based programming
New Enumeration
These rules must be followed to program the dynamics units (Speed, Accel/ Decel,
and Jerk) of all motion instructions.
• When Speed is in either units/sec, %max, or seconds, then the instruction is
considered to be in Time Driven mode, regardless of the selection of units
for acceleration, deceleration, or jerk.
• When Speed is in either Master Units or in Units/MasterUnit, then the
instruction is considered to be in Master Driven mode, regardless of the
selection of units for acceleration, deceleration, or jerk.
• Speed, Acceleration, Deceleration, and Jerk must always be programmed in
the same mode (Time Driven or Master Driven) or you get a runtime error.
Deceleration, and Jerk
Enumerations
 Loading...
Loading...


