Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018 3
Summary of changes
This manual includes new and updated information. Use these reference tables to
locate changed information.
Global changes
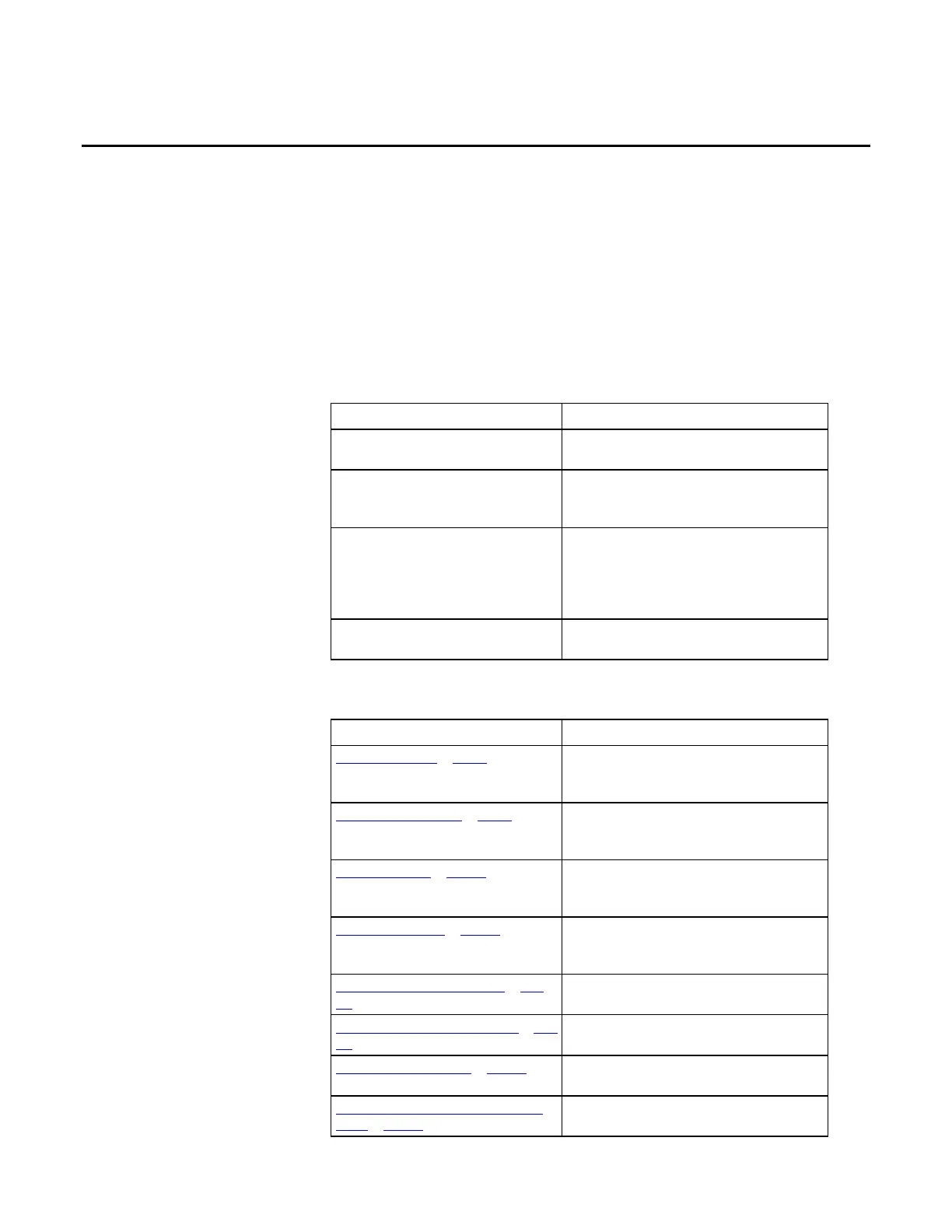
This table identifies changes that apply to all information about a subject in the
manual and the reason for the change. For example, the addition of new supported
hardware, a software design change, or additional reference material would result
in changes to all of the topics that deal with that subject.
Subject Reason
All instruction topics. Added new safety controllers 5580 and 5380 to the list of
applicable controllers.
All instruction topics Updated the Ladder Diagram, Reset Signal, and Example
images to reflect the updated user interface.
All instruction topics In the Major/Minor Faults and See also section, replaced the
Common Attributes cross reference with a new cross
reference to the Index Through Arrays topic.
All instruction chapter title topics Added new link table with links to each instruction in the
chapter.
Topic Name Reason
Motion Axis Stop (MAS) on page 84 Updated the programming guidelines section with new
paragraph explaining using MAS on any axis associated
with a coordinate system.
Motion Direct Drive Off (MDF) on page 51 Updated the programming guidelines section with new
paragraph explaining using MAS on any axis associated
with a coordinate system.
Motion Axis Jog (MAJ) on page 101 Updated the programming guidelines section with new
paragraph explaining using MAS on any axis associated
with a coordinate system.
Motion Axis Move (MAM) on page 112 Updated the programming guidelines section with new
paragraph explaining using MAS on any axis associated
with a coordinate system.
Motion Run Hookup Diagnostic (MRHD) on page
330
Updated the flow chart
Master Driven Coordinated Control (MDCC) on page
354
Updated the description for the Nominal Master Velocity
operand.
Motion Coordinated Stop (MCS) on page 465 Updated the descriptions for the Decel Units and Jerk Units
operands.
Motion Coordinated Transform with Orientation
(MCTO) on page 367
New instruction
 Loading...
Loading...


