Process Control Instructions
80 Rockwell Automation Publication 1756-RM006K-EN-P - November 2018
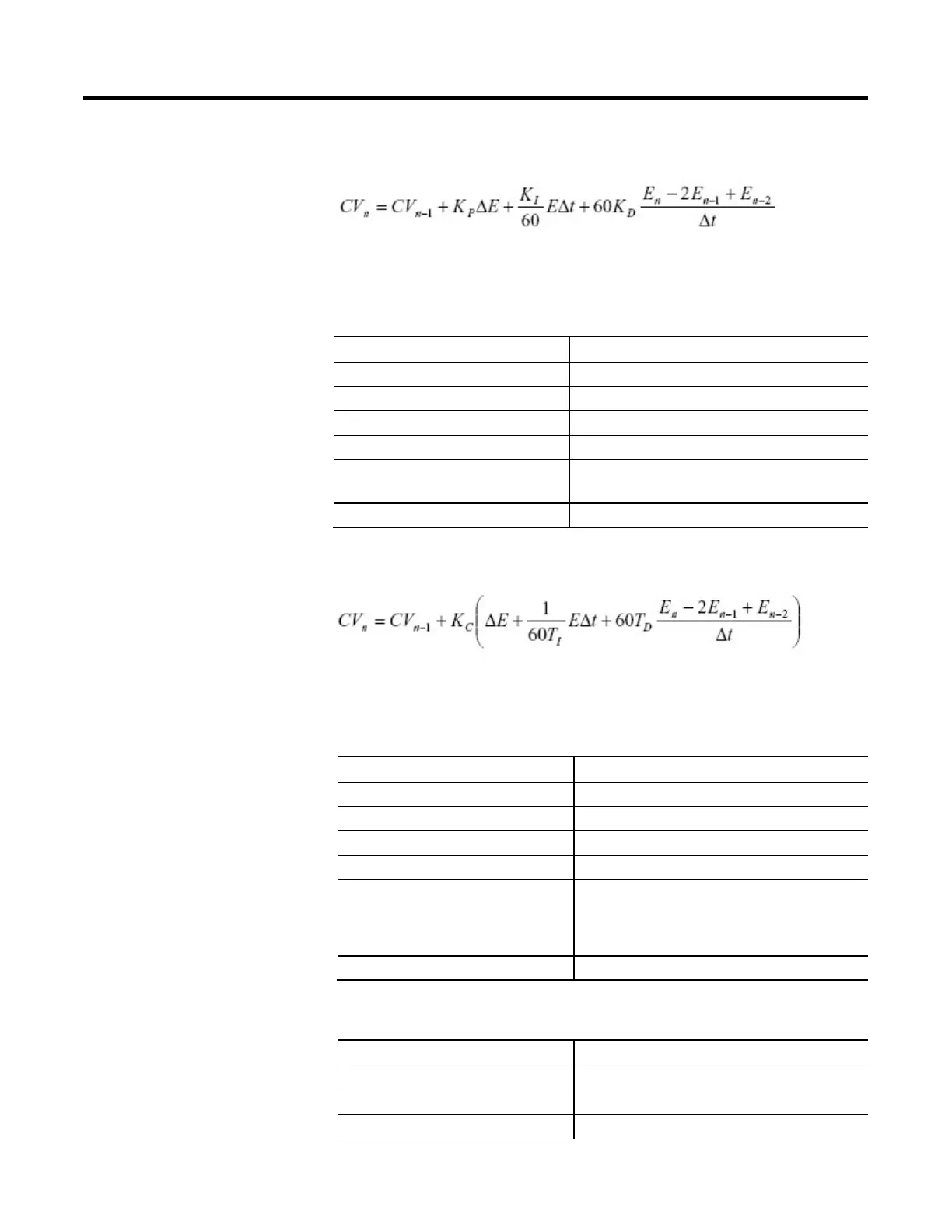
Independent Gains Form
In this form of the algorithm, each term of the algorithm (proportional, integral,
and derivative) has a separate gain. Changing one gain only affects that term and
not any of the others, where:
PIDE term: Description:
CV Control variable
E Error in percent of span
∆t
Update time in seconds used by the loop
K
p
Proportional gain
K
I
Integral gain in min
-1
a larger value of K
I
causes a faster integral response.
K
D
Derivative gain in minutes
Dependent Gains Form
This form of the algorithm changes the proportional gain into a controller gain.
By changing the controller gain, you change the action of all three terms
(proportional, integral, and derivative) at the same time, where:
PIDE term: Description:
CV Control variable
E Error in percent of span
∆t
Update time in seconds used by the loop
K
c
Controller gain
T
I
Integral time constant in minutes per repeat a larger value of T
1
causes a slower integral response
It takes T
1
minutes for the integral term to repeat the action of the
proportional term in response to a step change in error.
T
D
Derivative time in constant in minutes
PIDE term: Description:
CV Control variable
E Error in percent of span
∆t
Update time in seconds used by the loop
 Loading...
Loading...



