6
Application Features
For further information visit: www.abpowerflex.com or www.ab.com/support/abdrives
Proportional, Integral, Differential Control Loop
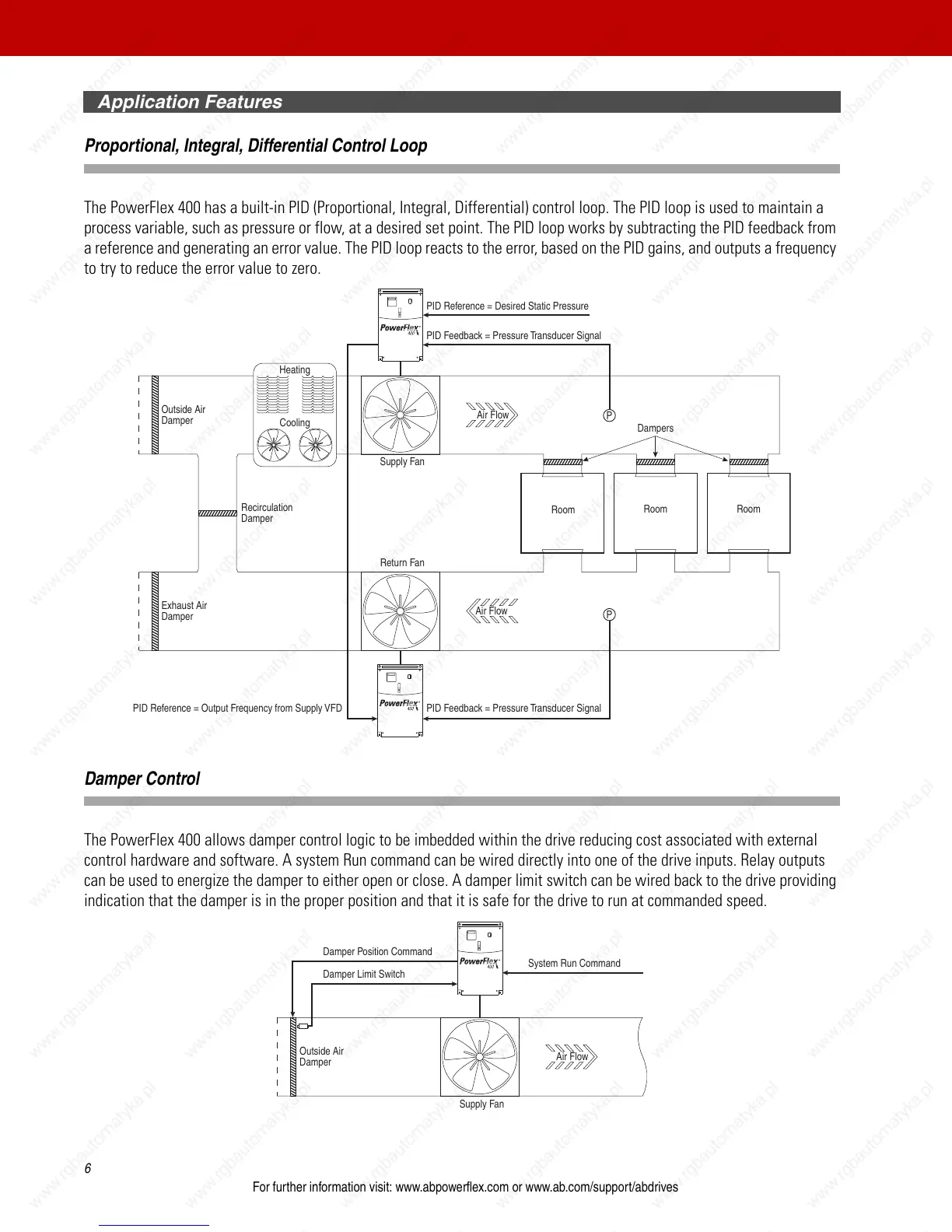
The PowerFlex 400 has a built-in PID (Proportional, Integral, Differential) control loop. The PID loop is used to maintain a
process variable, such as pressure or flow, at a desired set point. The PID loop works by subtracting the PID feedback from
a reference and generating an error value. The PID loop reacts to the error, based on the PID gains, and outputs a frequency
to try to reduce the error value to zero.
Damper Control
The PowerFlex 400 allows damper control logic to be imbedded within the drive reducing cost associated with external
control hardware and software. A system Run command can be wired directly into one of the drive inputs. Relay outputs
can be used to energize the damper to either open or close. A damper limit switch can be wired back to the drive providing
indication that the damper is in the proper position and that it is safe for the drive to run at commanded speed.
Return Fan
Supply Fan
Air Flow
Air Flow
Room
Room Room
Heating
Cooling
P
PID Feedback = Pressure Transducer Signal
PID Reference = Desired Static Pressure
Outside Air
Damper
Exhaust Air
Damper
Recirculation
Damper
Dampers
P
PID Feedback = Pressure Transducer SignalPID Reference = Output Frequency from Supply VFD
Supply Fan
Air Flow
Damper Limit Switch
Damper Position Command
System Run Command
Outside Air
Damper

 Loading...
Loading...












